| lori | Дата: Среда, 29.10.2014, 14:54 | Сообщение # 1 |
 12 Вольт
Группа: Пользователи
Сообщений: 108
Репутация: 20
Статус: Offline
| Хочу представить новый проект по исследованию "роевого поведения" роботов.
Идея проекта зародилась около месяца назад, и состоит в создании небольшого количества (3-10 шт.) роботизированных платформ, использования компьютерного зрения и алгоритмов коллективного поведения роботов.
Стоят следующие задачи:
1. собрать из готовых комплектующих несколько не больших робо-платформ на колесах или гусиницах;
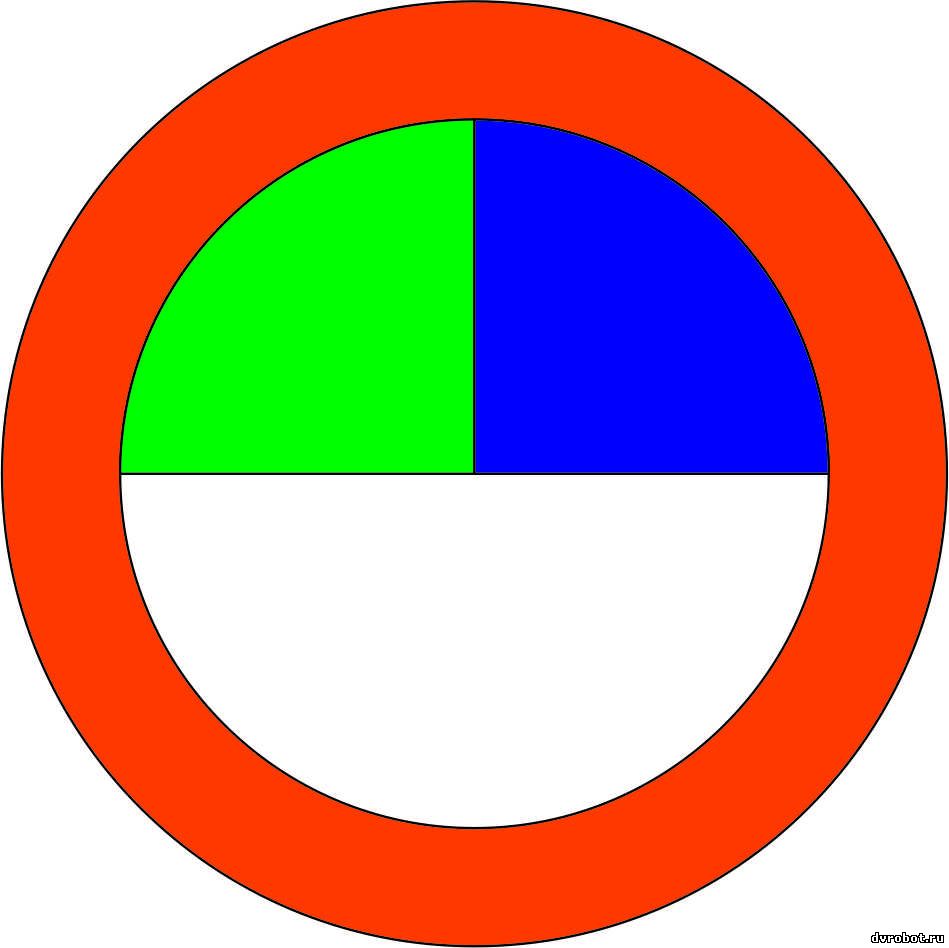
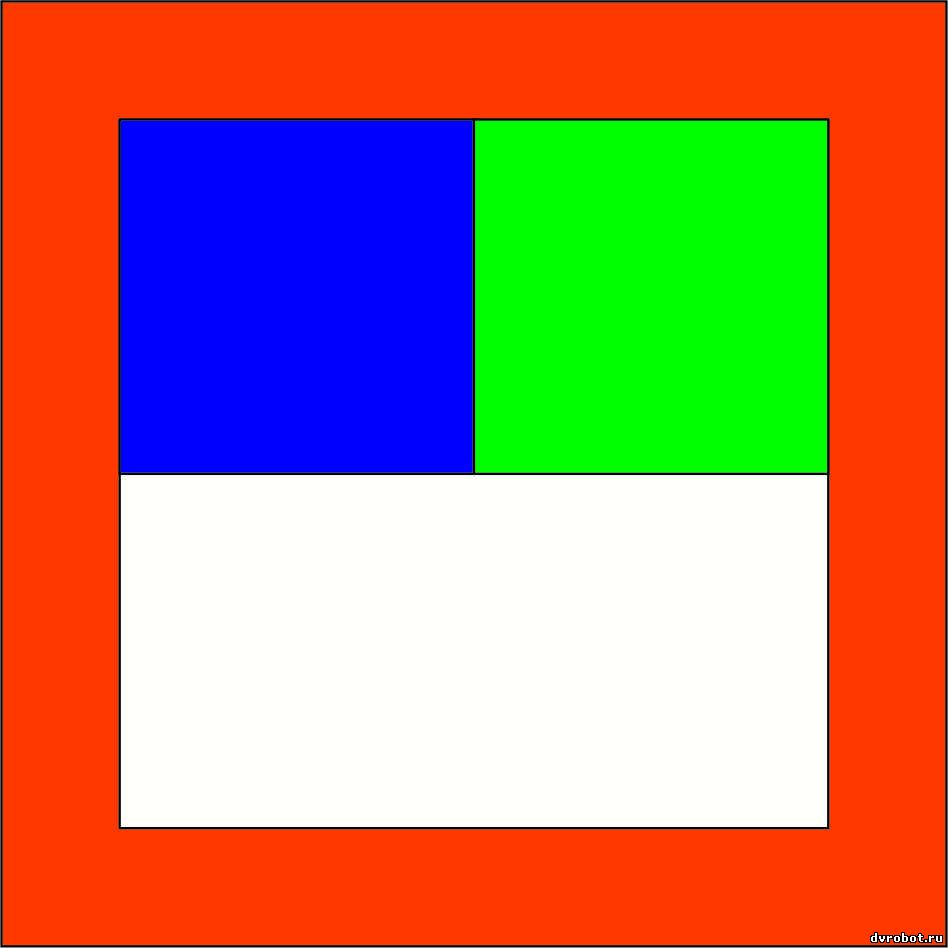
2. для того чтобы роботы отличались друг от друга снабдить каждого своей цветной меткой;
3. изготовить равномерно залитое одним цветом поле по которому будут кататься роботы;
4. над полем установить камеру;
5. с помощью openCV детектировать роботов на поле и по WiFi передавать на них команды управления.
Это общая идея, а дальше... все зависит от фантазии. Необходимо будет написать несколько сценариев поведения. К примеру: роботов можно будет поделить на две команды и обучить игре в футбол, или теннис, можно играть в сумо, догонялки с роботом, лабиринт, движение по линии, танцы роботов, бои роботов и т.д. и т.п., в общем все что угодно, на сколько фантазии хватит.
Самое главное что сами платформы будут очень просты и не дороги - управляющий контроллер (600 руб.), драйвер двух моторов (450 руб.), WiFi модуль (3700 руб.), понижающий модуль (130 руб.) аккумуляторы (2 х 450 руб.), два двигателя с колесами и сама платформа (990 руб.), итого 6770 рублей. Остальное есть в наличии: ПК, видео камера. Изготовить поле и метки не составит труда. OpenCV - бесплатная библиотека компьютерного зрения. Все прочее - "прямые ручки", "ясные мозги", "непреодолимое желание" - все это тоже имеется.
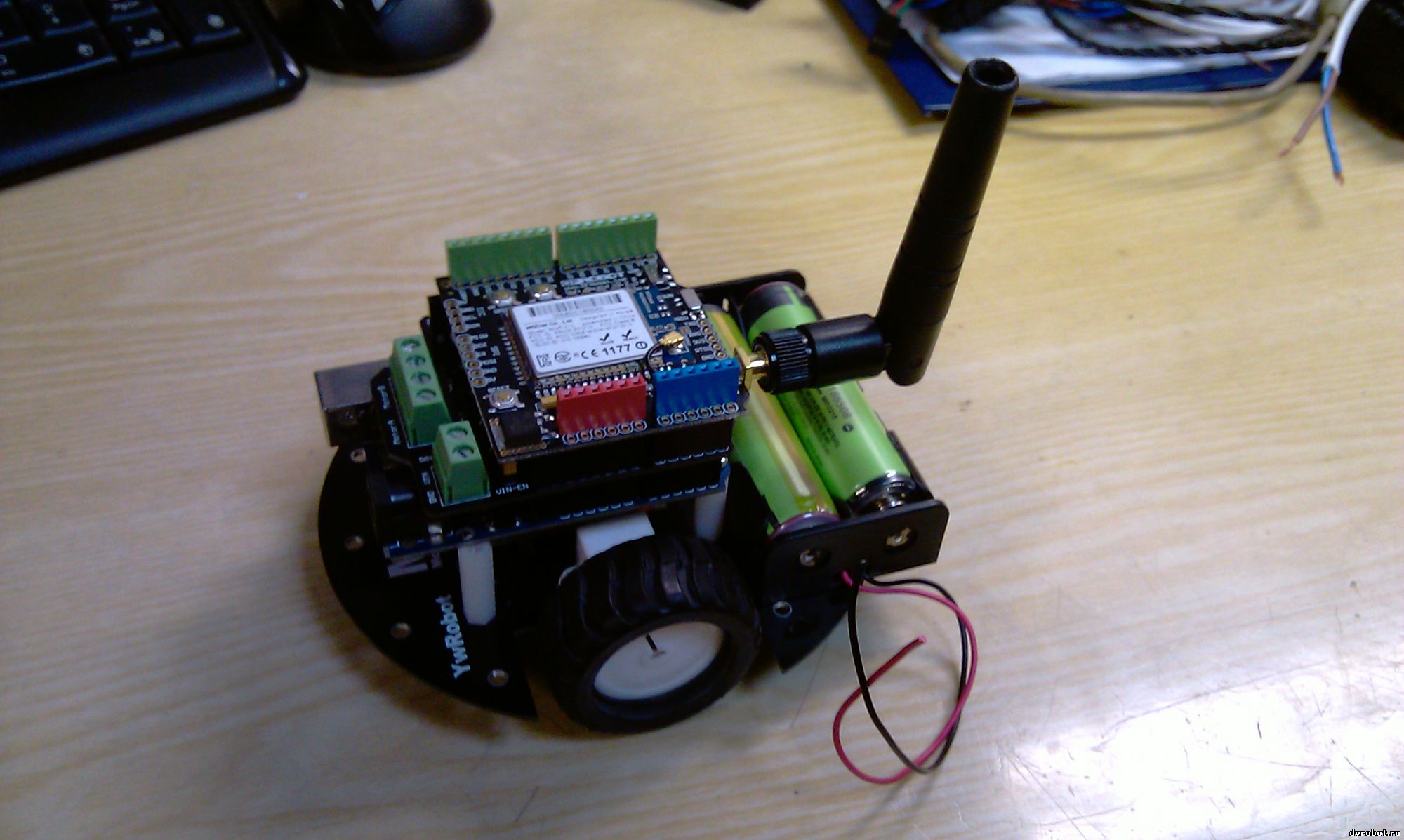
Приобрели две колесные платформы и электронику к ним. Вот как выглядит:

А это уже в собранном виде:

Еще одна гусеничная, и комплектующие для самодельной балансирующей платформы заказаны и где то в пути к нам.
Осталось только написать скетч для Arduino, наладить связь с ПК, написать управляющую программу и создать сценарии поведения роботов.
Предложения и здоровая критика приветствуются.
|
| |
| |
| lori | Дата: Четверг, 13.11.2014, 06:56 | Сообщение # 9 |
|
12 Вольт
Группа: Пользователи
Сообщений: 108
Репутация: 20
Статус: Offline
| Господа, все, что написано выше, по поводу сборки роботов, удешевления их конструкции и пр. это, конечно замечательно, и этим непременно нужно воспользоваться. Но все это не имеет никакого практического смысла в разрезе проекта вообще и данного блога в частности, если не будет создана управляющая программа для компьютера которая будет управлять bot-ами, а так же отслеживать другие объекты на поле. Без такой программы bot-ы будут просто бесполезными железяками с моторчиками (если конечно не применить их в других проектах). Думаю, что конструкция bot-ов уже достаточно подробно рассмотрена, предложено масса интересных решений в техническом и экономическом аспектах. Предлагаю переключиться на программную часть проекта.
Наша команда уже начала создавать программу отслеживания и управления. Как уже писалось, программный код создается на C++ в среде программирования Visual Studio 2012, с применением библиотеки компьютерного зрения openCV. Сам проект понемногу развивается, не без учета пожеланий и идей сообщества roboforum - всем огромное спасибо за советы и рекомендации. Надеемся и в дальнейшем получать от форумчан конструктивную критику и дельные советы.
На сегодняшний день имеем следующее -
В техническом плане:
1. собрано несколько bot-ов;
2. имеется прототип поля по которому роботы будут кататься.
В программном плане:
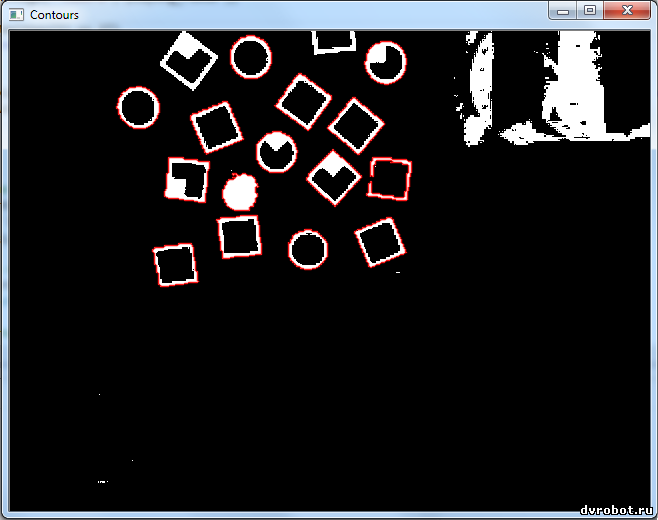
1. написана часть программного кода по распознаванию меток ботов на поле.
Если кому интересно здесь программный код. Для работы нужна библиотека openCV и подключенная WEB-камера.
Код #include "stdafx.h"
#include "cv.h"
#include "highgui.h"
using std::cout;
using std::endl;
using namespace cv;
void FindBot( IplImage& img );
void FindColor( IplImage& img, int ); // поиск по цвету, int - код цвета
// (0 - оранжевый, 1 - красный, 2 - синий, 3 - зеленый, 4 - желтый)
void Counter( IplImage* img ); // выделение контуров
void Metka( IplImage& img, int& x, int& y, int& r, int area, int color ); // распознавание метки
void ConversionThreshold( IplImage* img ); // пороговое преобразование
void Color( IplImage& img, int& x, int& y, int& r, int area, int color );
IplImage *playing_field = NULL; // картинка для хранения кадра с камеры
IplImage* RGBThreshold = NULL; //cvCreateImage( cvGetSize(playing_field), 8, 3 ); // кадр для хранения порогового преобразования
struct obj {public: char name; CvPoint center; int radius; int area;}; // наименование, центр (x, y) и радиус описанной окружности, площадь фигуры
obj bot, shape;
struct bot {public: int ID; CvPoint center; int radius; int vector;};
int main( int argc, char** argv ) {
CvCapture *capture = cvCreateCameraCapture( 0 ); // инициализируем камеру
if(capture == NULL) // если камер не обнаружено - выходим
return 0;
//cvNamedWindow( "camera", CV_WINDOW_AUTOSIZE ); // Окошко
while (1) {
playing_field = cvQueryFrame( capture ); // получаем фрейм из камеры
if(!playing_field) // если фрейм не получен
break;
// Создаем копию кадра
IplImage* Image = cvCreateImage( cvGetSize(playing_field), 8, 3 ); //кадр для передачи в функции для последовательной обработки
RGBThreshold = cvCreateImage( cvGetSize(playing_field), 8, 3 ); // кадр для хранения порогового преобразования
cvCopy( playing_field, Image ); // копируем кадр
ConversionThreshold( Image ); // пороговое преобразование
cvCopy( Image, RGBThreshold ); // копируем кадр порогового перобразования
cvShowImage( "RGB cvThreshold 2", RGBThreshold );
FindBot( *Image ); // поиск ботов в кадре
cvShowImage( "camera", playing_field );
if(cvWaitKey(1) == 27)
break; // Если Esc - выходим
// Освободить ресурсы
cvReleaseImage( &Image );
cvReleaseImage( &RGBThreshold );
}
// Освободить ресурсы
cvReleaseCapture( &capture );
cvDestroyAllWindows(); // закрываем все окна
return 0;
}
// Поиск ботов
void FindBot( IplImage& Img ) {
FindColor( Img, 0 ); // выделить цвет
Counter( &Img ); // выделить контуры
}
// Пороговое преобразование
void ConversionThreshold( IplImage* Image )
{
// Кадры для хранения отдельных слоёв BGR-изображений
IplImage* r = cvCreateImage( cvGetSize(Image), IPL_DEPTH_8U, 1 );
IplImage* g = cvCreateImage( cvGetSize(Image), IPL_DEPTH_8U, 1 );
IplImage* b = cvCreateImage( cvGetSize(Image), IPL_DEPTH_8U, 1 );
cvSplit( Image, b, g, r, 0 ); // разбиваем на слои
/* cvAdaptiveThreshold( r, r, 255, CV_ADAPTIVE_THRESH_GAUSSIAN_C, CV_THRESH_BINARY, 7, 1 );
cvAdaptiveThreshold( g, g, 255, CV_ADAPTIVE_THRESH_GAUSSIAN_C, CV_THRESH_BINARY, 7, 1 );
cvAdaptiveThreshold( b, b, 255, CV_ADAPTIVE_THRESH_GAUSSIAN_C, CV_THRESH_BINARY, 7, 1 );
*/
// Выполняем пороговое преобразование
cvThreshold( r, r, 120, 250, CV_THRESH_BINARY ); // 150 250
cvThreshold( g, g, 120, 250, CV_THRESH_BINARY );
cvThreshold( b, b, 120, 250, CV_THRESH_BINARY );
// Показать результат порового преобразования
cvShowImage( "R", r );
cvShowImage( "G", g );
cvShowImage( "B", b );
cvMerge(b, g, r, 0, Image); // суммируем результаты
// Освобождаем ресурсы
cvReleaseImage( &r );
cvReleaseImage( &g );
cvReleaseImage( &b );
}
// Поиск меток цвета
void FindColor( IplImage& Img, int color ) {
IplImage* Image = cvCreateImage( cvGetSize(&Img), 8, 3 );
cvCopy(&Img, Image);
// Теперь необходимо получить доступ ко всем пикселям.
uchar* ptr1;
ptr1 = (uchar*) (Image->imageData );
// Выделить все пиксели удовлетворяющие искомому цвету (BGR)
for (int i = 0; i < Image->height; i++)
for (int j = 0; j < Image->width; j++) {
switch (color) {
case 0: // черный цвет
if (ptr1[j * 3 + i * Image->widthStep] == 0 && // B
ptr1[j * 3 + 1 + i * Image->widthStep] == 0 && // G
ptr1[j * 3 + 2 + i * Image->widthStep] == 0) { // R
ptr1[j * 3 + i * Image->widthStep] = 255;
ptr1[j * 3 + 1 + i * Image->widthStep] = 255;
ptr1[j * 3 + 2 + i * Image->widthStep] = 255;
}
else {
ptr1[j * 3 + i * Image->widthStep] = 0;
ptr1[j * 3 + 1 + i * Image->widthStep] = 0;
ptr1[j * 3 + 2 + i * Image->widthStep] = 0;
}
break;
case 1: // белый цвет
if (ptr1[j * 3 + i * Image->widthStep] > 200 && // B
ptr1[j * 3 + 1 + i * Image->widthStep] > 200 && // G
ptr1[j * 3 + 2 + i * Image->widthStep] > 200) { // R
ptr1[j * 3 + i * Image->widthStep] = 255;
ptr1[j * 3 + 1 + i * Image->widthStep] = 255;
ptr1[j * 3 + 2 + i * Image->widthStep] = 255;
}
else {
ptr1[j * 3 + i * Image->widthStep] = 0;
ptr1[j * 3 + 1 + i * Image->widthStep] = 0;
ptr1[j * 3 + 2 + i * Image->widthStep] = 0;
}
break;
case 2: // синий цвет
if (ptr1[j * 3 + i * Image->widthStep] > 200 && // B
ptr1[j * 3 + 1 + i * Image->widthStep] == 0 && // G
ptr1[j * 3 + 2 + i * Image->widthStep] == 0) { // R
ptr1[j * 3 + i * Image->widthStep] = 255;
ptr1[j * 3 + 1 + i * Image->widthStep] = 255;
ptr1[j * 3 + 2 + i * Image->widthStep] = 255;
}
else {
ptr1[j * 3 + i * Image->widthStep] = 0;
ptr1[j * 3 + 1 + i * Image->widthStep] = 0;
ptr1[j * 3 + 2 + i * Image->widthStep] = 0;
}
break;
case 3: // красный цвет
if (ptr1[j * 3 + i * Image->widthStep] == 0 && // B
ptr1[j * 3 + 1 + i * Image->widthStep] == 0 && // G
ptr1[j * 3 + 2 + i * Image->widthStep] > 200) { // R
ptr1[j * 3 + i * Image->widthStep] = 255;
ptr1[j * 3 + 1 + i * Image->widthStep] = 255;
ptr1[j * 3 + 2 + i * Image->widthStep] = 255;
}
else {
ptr1[j * 3 + i * Image->widthStep] = 0;
ptr1[j * 3 + 1 + i * Image->widthStep] = 0;
ptr1[j * 3 + 2 + i * Image->widthStep] = 0;
}
break;
case 4: // желтый цвет
if (ptr1[j * 3 + i * Image->widthStep] == 0 && // B
ptr1[j * 3 + 1 + i * Image->widthStep] > 200 && // G
ptr1[j * 3 + 2 + i * Image->widthStep] > 200) { // R
ptr1[j * 3 + i * Image->widthStep] = 255;
ptr1[j * 3 + 1 + i * Image->widthStep] = 255;
ptr1[j * 3 + 2 + i * Image->widthStep] = 255;
}
else {
ptr1[j * 3 + i * Image->widthStep] = 0;
ptr1[j * 3 + 1 + i * Image->widthStep] = 0;
ptr1[j * 3 + 2 + i * Image->widthStep] = 0;
}
break;
}
}
cvCopy( Image, &Img );
// Освободить ресурсы
cvReleaseImage( &Image );
}
// Выделить все найденные объекты
void Counter( IplImage* img ) {
IplImage* img_gray = cvCreateImage( cvSize(img->width, img->height), 8, 1 );
CvSeq* contours = 0;
CvMemStorage* storage = cvCreateMemStorage(0);
cvCvtColor( img, img_gray, CV_BGR2GRAY );
// Поиск контуров
cvFindContours( img_gray, storage, &contours, sizeof(CvContour),
CV_RETR_EXTERNAL, CV_CHAIN_APPROX_SIMPLE, cvPoint(0,0) );
CvSeq* h_next = 0;
CvPoint2D32f center;
float radius;
// Поиск объектов
for(CvSeq* c = contours; c != NULL; c = c->h_next) {
if (c != contours) {
cvMinEnclosingCircle( h_next, ¢er, &radius ); // поиск центра и радиуса объекта
shape.radius = radius;
if (radius >= 20 && radius < 50) { // ограничить минимальный и максимальный радиус
// Координаты центра окружности
shape.center.x = center.x;
shape.center.y = center.y;
if ((shape.center.x - shape.radius > 0 && shape.center.y - shape.radius > 0) && // только если объект полностью в поле кадра
(shape.center.x + shape.radius < img->width && shape.center.y + shape.radius < img->height)) {
shape.area = cvContourArea( h_next ); // запомнить площадь объекта
for (int color = 1; color < 5; color++) {
Metka( *RGBThreshold, shape.center.x, shape.center.y, shape.radius, shape.area, color ); // распознать метку
}
cvDrawContours( img, h_next, CV_RGB(255,0,0), CV_RGB(0,255,0), 0, 1, CV_AA, cvPoint(0,0) ); // нарисовать контур объекта
cvCircle( playing_field, shape.center, shape.radius, CV_RGB(255,0,0), 1, 8, 0 ); // выделить найденный объект в кадре
}
}
}
h_next = c;
}
cvShowImage( "Contours", img );
// Освободить ресурсы
cvReleaseMemStorage( &storage );
cvReleaseImage( &img_gray );
}
// Распознать метку
void Metka( IplImage& img, int& x, int& y, int& r, int area, int color ) {
IplImage* roii = cvCreateImage( cvGetSize(&img), 8, 3 ); // кадр для ROI
cvCopy( &img, roii ); // скопировать кадр в ROI
cvSetImageROI( roii, cvRect(x - r, y - r, r * 2, r * 2) ); // устанавливаем ROI с изображением полученного объекта
CvPoint pt1, pt2; pt1.x = x - r; pt1.y = y - r; pt2.x = pt1.x + r * 2; pt2.y = pt1.y + r * 2;
FindColor( *roii, color ); // выделить цвет
Color( *roii, x, y, r, area, color ); // пометить найденный цвет на метке
cvShowImage( "ROI", roii );
// Освободить ресурсы
cvResetImageROI( roii ); // сброс ROI
cvReleaseImage( &roii );
}
void Color( IplImage& img, int& x, int& y, int& r, int area, int color )
{
IplImage* img_gray = cvCreateImage( cvGetSize(&img), 8, 1 );
cvConvertImage( &img, img_gray, CV_BGR2GRAY );
//cvCvtColor( roii, img_gray, CV_BGR2GRAY );
CvSeq* contours = 0;
CvMemStorage* storage = cvCreateMemStorage(0);
// Поиск контуров
cvFindContours( img_gray, storage, &contours, sizeof(CvContour),
CV_RETR_LIST, CV_CHAIN_APPROX_SIMPLE, cvPoint(0, 0) );
CvSeq* h_next = 0;
CvPoint2D32f center;
float radius;
// Выбор цвета выделения
int red, grin, blu;
switch (color) {
case 0:
red = 0; grin = 255; blu = 255;
break;
case 1:
red = 255; grin = 255; blu = 0;
break;
case 2:
red = 0; grin = 0; blu = 255;
break;
case 3:
red = 255; grin = 0; blu = 0;
break;
case 4:
red = 255; grin = 237; blu = 0;
break;
}
// Поиск меток
for (CvSeq* c = contours; c != NULL; c = c->h_next) {
if (c != contours) {
cvMinEnclosingCircle( h_next, ¢er, &radius ); // поиск центра и радиуса объекта
int rad = radius;
int are = cvContourArea( h_next );
if ((are < area / 2 && are > area / 10) && // площадь цветовой метки должен быть в 3 раза меньше площади объекта
((center.x + rad) < r * 2 && (center.y + rad) < r * 2) && // только если объект полностью в поле ROI
(center.x - rad > 0 && center.y - rad > 0)) {
// Координаты центра окружности
CvPoint p;
p.x = (x - r) + center.x;
p.y = (y - r) + center.y;
cvCircle( playing_field, p, rad, CV_RGB(red, grin, blu), 1, 8, 0 ); // выделить найденный объект в кадре
}
}
h_next = c;
}
cvReleaseMemStorage( &storage );
cvReleaseImage( &img_gray );
}
Сообщение отредактировал lori - Четверг, 13.11.2014, 06:59 |
| |
| |