|
Контроллер для двух моторов
|
|
| Serg | Дата: Пятница, 18.01.2013, 21:09 | Сообщение # 1 |
|
Ампер
Группа: Модераторы
Сообщений: 510
Репутация: 28
Статус: Offline
| Помогите разобраться! С электроникой дружу боле менее, а вот с Aurdino связался в первые языков программирования не знаю. Пытаюсь разобраться, нужда заставляет собрать контроллер для двух моторов. Нужно написать sketch Вот мой пример все в чем, пока я разобрался не пинайте сильно так как проверить не на чем железо еще только едет в мою провинцию.
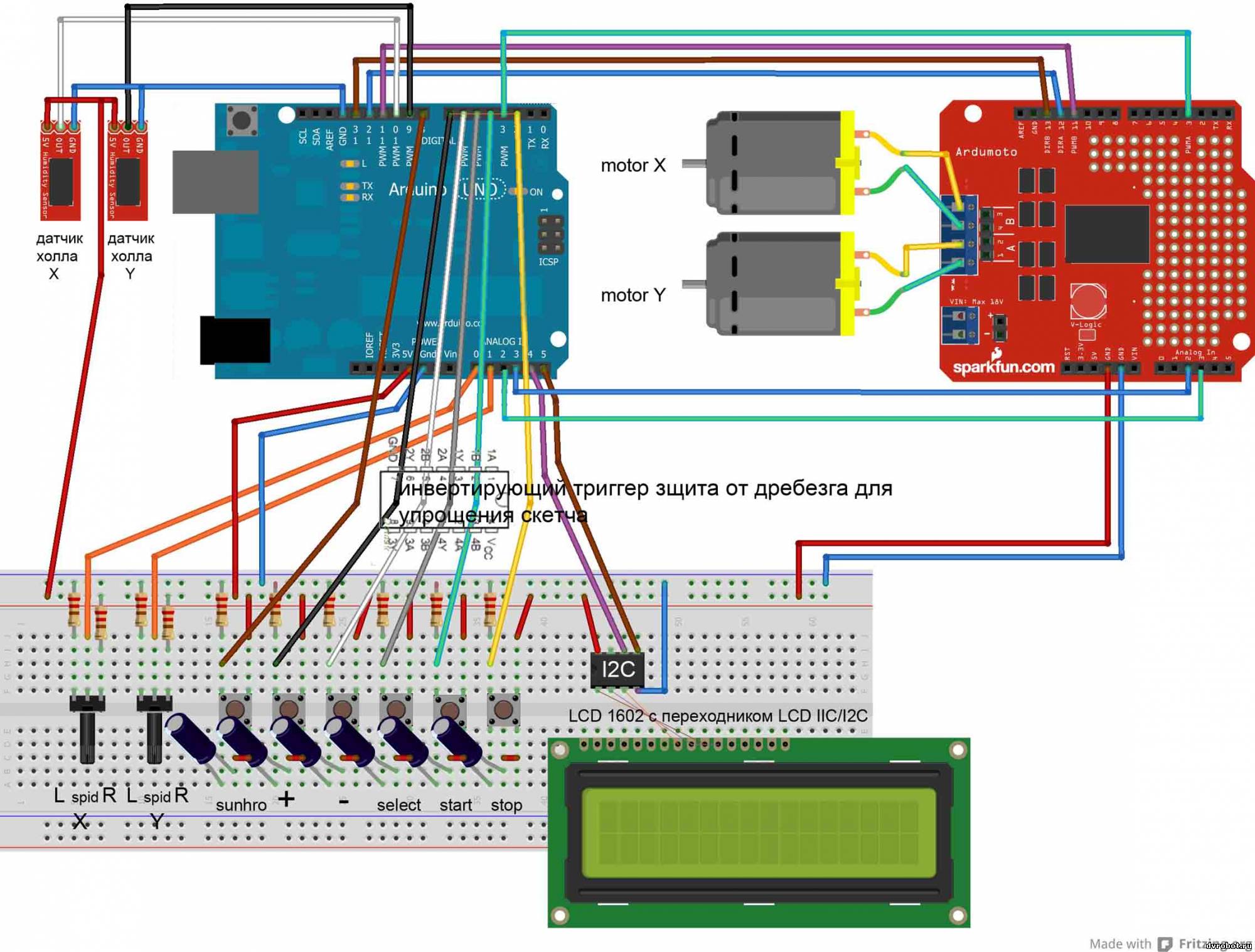
Описание работы ниже схема:
ОПИСАНИЕ: ниже схема
1ч.)Режим "Analog" При включение питания на экране загорается приветствие чере 1 скунду вывод на дисплей "Analog", при повороте
потенциометра Y от среднего положения вправо двигатель Y начинает вращаться в право чем больше угол поворота потенциометра
тем быстрее скорость, при повороте в лево от среднего положения двигатель вращается влево, тоже с регулировкой скорости.
Двигатель Х работает аналогично от потенциометра X.
2ч.) Режим Programm При нажатии кнопки selekt первый раз,отключается режим Analog, на дисплей выводится setup, в этом режиме кнопками + и - выставляется
количество импульсов поступающих с датчика Y с шагом +/-1 отображающих на дисплее в нижней строке, ( setup )
( Y+1 X+3 )
следующее нажатие selekt устанавливается количество импульсов с датчика Х.
( setup )
( Y+1 X+3 )
третье нажатие selekt вывод на дисплей Programm, при нажатие кнопки Start вывод на дисплей Program start идет ожидание сигнала
с кнопки Sunhro при поступлении сигнала, двигателя срабатывают на количество импульсов с датчиков и останавливается, снова идет
ожидание Sunhro.
Если количество импульсов в setup выставлено ноль для Y илиХ то соответствующий двигатель остается на одном месте не зависимо от поступления импульсов.
При нажатии кнопки stop вывод на дисплей Programm stop процесс останавливается , при повторном нажатии переход в режим
аналог вывод на дисплей Analog
Код #include <Wire.h>
#include <LiquidCrystal_I2C.h> //импорт библиотеки I2C/TWI Interface
LiquidCrystal_I2C lcd(0x27,16,2); //установка адреса жк 0х27
int potyPin =1;
int potxPin =0;
int in1Pin =13;// управление моторoм Y
int in2Pin =12; // управление моторoм Y
int in3Pin =16; //управление моторoм X
int in4Pin =17; //управление моторoм X
int speedyPin =3;// скорость мотора Y ШИМ
int speedxPin =11;//скорость мотора Х ШИМ
void setup()
{
Serial.begin(9600);
lcd.init(); //инциализация жк
// установка pin датчиков холла, вход:
// установка pin потенциомеров
pinMode(potyPin, INPUT);
pinMode(potxPin, INPUT);
//установка pin моторов
pinMode(in1Pin, OUTPUT);
pinMode(in2Pin, OUTPUT);
pinMode(in3Pin, OUTPUT);
pinMode(in4Pin, OUTPUT);
pinMode(speedyPin, OUTPUT);
pinMode(speedxPin, OUTPUT);
}
void loop()
{
lcd.backlight(); //вывод сообщения на жк
if (Serial.available()) //Ожидание с порта
{
lcd.setCursor(0, 0); //установка курсора на первую строку
lcd.print("Hello"); //вывод первой строки приветствия
delay(200);
lcd.setCursor(0, 1); //установка курсора на вторую стоку
lcd.print("SlideUno"); //вывод второй строки приветствия
delay(200);
// прочитать все доступные символы
while (Serial.available() > 0)
// выводим каждый символ на ЖК
lcd.write(Serial.read());
delay(1500);
// очистить экран
lcd.clear();
lcd.setCursor(0, 0);
lcd.print("Analog"); //вывод аналогово режима
delay(200);
// прочитать все доступные символы
while (Serial.available() > 0)
// выводим каждый символ на ЖК
lcd.write(Serial.read());
{
// первая часть analog
// инциализация джойстиков
int poty;
int potx;
// считывание значений с потенциометров
int val = map(analogRead(potxPin), 511, 1023, 511, 0);
Serial.println(val);
delay (20);
int val = map(analogRead(potyPin), 511, 1023, 511, 0);
Serial.println(val);
delay (20);
{
//управление двигателями
while(serial.available() == 0);
analogWrite(speedpin y,100);//Устанавливаем скорость как менять эти значения получая с поpта?
digitalWrite(in1Pin,LOW);// крутиться по часовой стрелке как менять эти значения получая с поpта?
digitalWrite(in2Pin,HIGH // как менять эти значения получая с порта?
analogWrite(speedPin x,100);//Устанавливаем скорость как менять эти значения получая с поpта?
digitalWrite(in3Pin,LOW);// крутиться по часовой стрелке как менять эти значения получая с поpта?
digitalWrite(in4Pin,HIGH // как менять эти значения получая с порта?
{ |
| |
| |
| Serg | Дата: Пятница, 18.01.2013, 21:10 | Сообщение # 2 |
|
Ампер
Группа: Модераторы
Сообщений: 510
Репутация: 28
Статус: Offline
| Автор, добавьте рисунок.
|
| |
| |
| sanik | Дата: Суббота, 19.01.2013, 02:56 | Сообщение # 3 |
 5 Вольт
Группа: Пользователи
Сообщений: 55
Репутация: 0
Статус: Offline
| добавил схему и переделал скетч:
Код #include <Wire.h>
#include <LiquidCrystal_I2C.h> //импорт библиотеки I2C/TWI Interface
LiquidCrystal_I2C lcd(0x27,16,2); //установка адреса жк 0х27
int potyPin = 1;
int potxPin = 0;
int ENA = 11;
int IN1 = 12;
int IN2 = 13;
int ENB = 11;
int IN3 = 16;
int IN4 = 17;
void setup()
{
Serial.begin(9600); //открываем порт устанавливаем скорость передачи
lcd.init(); //инциализация жк
// установка pin датчиков холла, вход:
// установка pin потенциомеров
pinMode(potyPin, INPUT);
pinMode(potxPin, INPUT);
//установка pin моторов
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
pinMode(IN3, OUTPUT);
pinMode(IN4, OUTPUT);
}
void loop()
{
lcd.backlight(); //вывод сообщения на жк
if (Serial.available()) //Ожидание с порта
{

Ну не знаю я
Сообщение отредактировал sanik - Среда, 30.01.2013, 05:35 |
| |
| |
| Ivan-771 | Дата: Суббота, 19.01.2013, 03:49 | Сообщение # 4 |
 5 Вольт
Группа: Пользователи
Сообщений: 39
Репутация: 0
Статус: Offline
| Вы свой код компилировали?
|
| |
| |
| sanik | Дата: Суббота, 19.01.2013, 05:41 | Сообщение # 5 |
|
5 Вольт
Группа: Пользователи
Сообщений: 55
Репутация: 0
Статус: Offline
| Цитата (Ivan-771) Вы свой код компилировали?
Ну не знаю я
|
| |
| |
| Ivan-771 | Дата: Суббота, 19.01.2013, 05:44 | Сообщение # 6 |
|
5 Вольт
Группа: Пользователи
Сообщений: 39
Репутация: 0
Статус: Offline
| Я, в том плане, проверяли ли вы его на ошибки?
|
| |
| |
| sanik | Дата: Суббота, 19.01.2013, 09:56 | Сообщение # 7 |
|
5 Вольт
Группа: Пользователи
Сообщений: 55
Репутация: 0
Статус: Offline
| Проверял  сейчас по другому делаю сейчас по другому делаю
Ну не знаю я
Сообщение отредактировал sanik - Суббота, 19.01.2013, 09:56 |
| |
| |
| Ivan-771 | Дата: Суббота, 19.01.2013, 10:08 | Сообщение # 8 |
|
5 Вольт
Группа: Пользователи
Сообщений: 39
Репутация: 0
Статус: Offline
| И что же?
CTRL+R, пробовали нажимать?
на вашем проекте не мало ошибок.
ругается на это
int val = map(analogRead(potхPin potyPin), 0, 1023, 0, 8);
Сообщение отредактировал Ivan-771 - Суббота, 19.01.2013, 10:11 |
| |
| |
| sanik | Дата: Суббота, 19.01.2013, 22:14 | Сообщение # 9 |
|
5 Вольт
Группа: Пользователи
Сообщений: 55
Репутация: 0
Статус: Offline
| Раньше не проверял код на ошибки потому что не знал как это делается 
Serg,
Помогите мне с моторами!!! Пожалуйста. Как их к осям джойстика подцепить? И менять вправление?
Код
Добавлено (19.01.2013, 22:14)
---------------------------------------------
Ivan-771, Сейчас уже не ругается... Я не знаю как вот это:
Код int ENA = 11;
int IN1 = 12;
int IN2 = 13;
int ENB = 11;
int IN3 = 16;
int IN4 = 17;
Объявить переменными пробовал ругаться начинает...
Ну не знаю я
Сообщение отредактировал sanik - Среда, 30.01.2013, 05:38 |
| |
| |
| Serg | Дата: Воскресенье, 20.01.2013, 12:45 | Сообщение # 10 |
|
Ампер
Группа: Модераторы
Сообщений: 510
Репутация: 28
Статус: Offline
| sanik, а как устроены джойстики, какие моторы и как они управляются?
|
| |
| |
| Ivan-771 | Дата: Воскресенье, 20.01.2013, 12:48 | Сообщение # 11 |
|
5 Вольт
Группа: Пользователи
Сообщений: 39
Репутация: 0
Статус: Offline
| Цитата (sanik) Ivan-771, Сейчас уже не ругается... Я не знаю как вот это:Посмотреть код
ПечатьОписание
·········10········20········30········40········50········60········70········80········90········100·······110·······120·······130·······1 40·······150
int ENA = 11;
int IN1 = 12;
int IN2 = 13;
int ENB = 11;
int IN3 = 16;
int IN4 = 17;
1.2.3.4.5.6.
Объявить переменными пробовал ругаться начинает...
Незнаю как в ардуино переменные объявляются, ибо пишу на CodeVisionAVR
я, использовал у себя так.
int i=1; // для блокнота
int a=1; //чтение ОЗУ
int b=1;
int d=1; //форматирование
int f=0; //для консоли.
|
| |
| |
| sanik | Дата: Воскресенье, 20.01.2013, 18:18 | Сообщение # 12 |
|
5 Вольт
Группа: Пользователи
Сообщений: 55
Репутация: 0
Статус: Offline
| Цитата (Serg) а как устроены джойстики, какие моторы и как они управляются?


|
| |
| |