| vanyfilatov | Дата: Понедельник, 13.04.2015, 07:05 | Сообщение # 1 |
 1.5 Вольт
Группа: Пользователи
Сообщений: 1
Репутация: 0
Статус: Offline
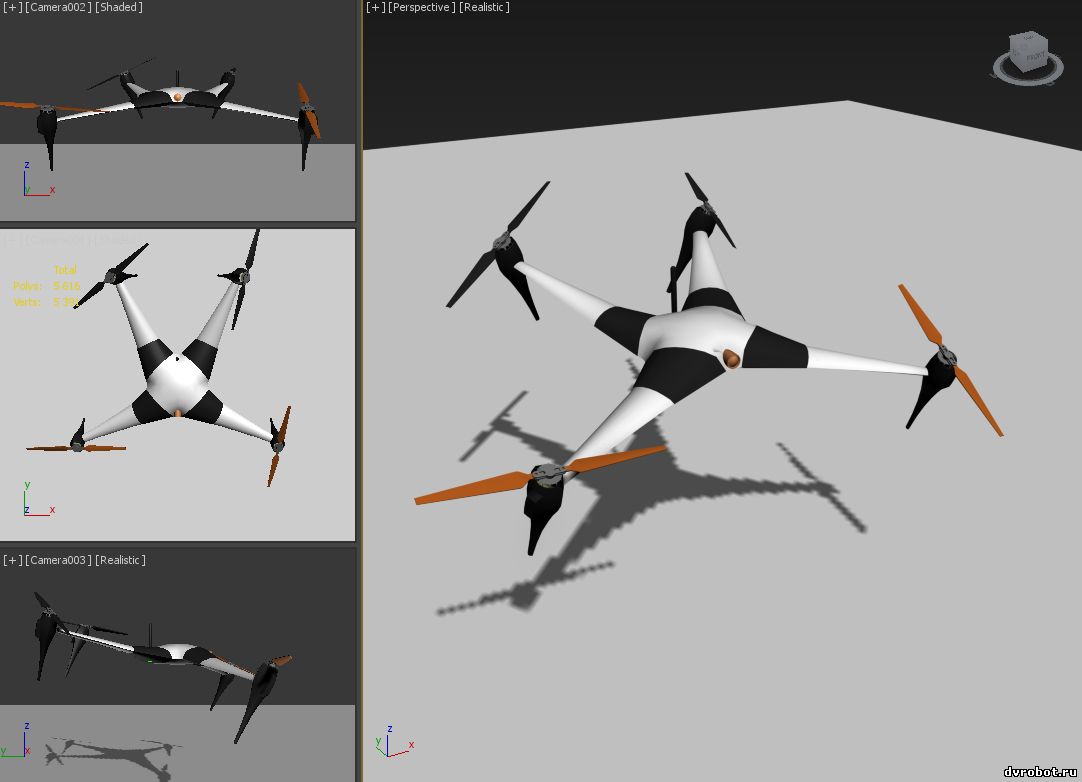
| Есть одна идея скрестить коптер с четырехногим роботом,
вот первый набросок

Диаметр между пропеллерами 1000мм.
В теории будет возможность неуклюже ходить и очень маневренно летать.
4 мотора с пропеллерами и 16 сервоприводов, по 4 на луч, 2 на мотор и 2 на основание луча.
Кожух между лучом и центральной коробкой гибкий, чтобы ничего не попадало+аэродинамика, планируется использовать аэродинамику лучей-крыльев,
по идее это даст экономию батарей, и возможность полета в режиме самолета, по типу "Оспрея"
Но есть проблема, как совместить мозги полетного контроллера и серво контроллера..
Оставив максимальную скорость просчета плат и не перегрузить конструкцию кучей контроллеров
причем не работающих в паре.
Собственно вопрос, возможно ли подключить к 32бит сервоконтроллеру http://dvrobot.ru/237/176.html датчики GY-80 АКСЕ-ГИРО-КОМПА-БАРОМЕТР http://dvrobot.ru/238/421.html и радио модуль http://dvrobot.ru/238/433.html
и сделать из него полетносервоконтроллер. По идее количество выходов позволяет, процессор тоже. Меня интересует сама возможность (совместимость этих модулей)
Новую программу мне помогут сделать если что.
Я не нашел пока что, но кто видел, подскажите. Может есть специализированный полетный контроллер ардуино (кроме ардупилот, слишком дорогой),который бы поддерживал минимум 24 мотора/сервопривода. Он бы сильно облегчил мне задачу.
|
| |
| |