|
Платформа Бархан
|
|
| Trooper_OK | Дата: Вторник, 16.09.2014, 00:24 | Сообщение # 1 |
 5 Вольт
Группа: Пользователи
Сообщений: 52
Репутация: 20
Статус: Offline
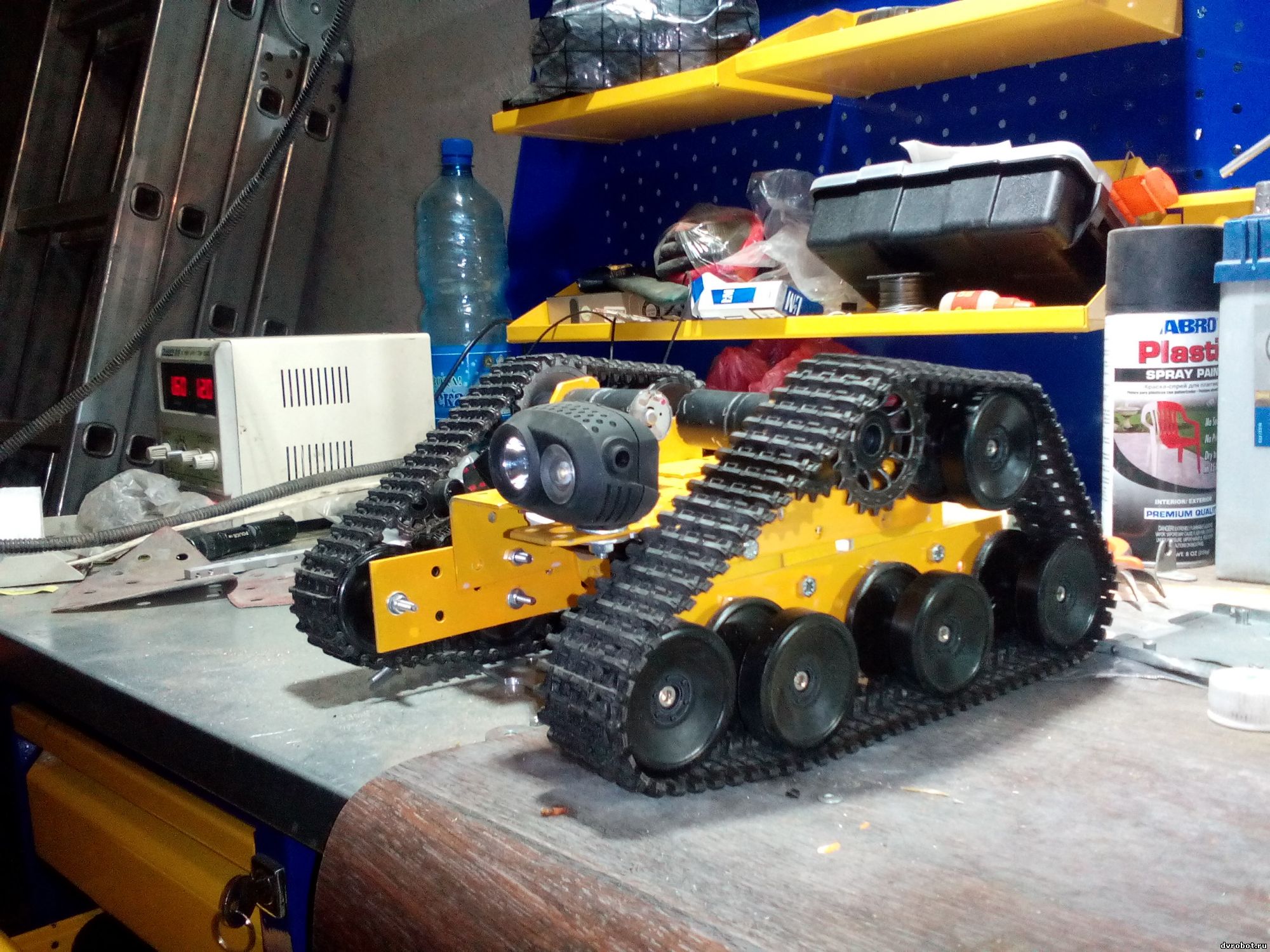
| Доброго времени суток ! Решил поделиться опытом в построении блютус-управляемой платформой. Занимаюсь монтажом СКС и часто требуется протягивать провода под подвесным потолком на большой высоте в помещениях где идет торговля и\или стоит много товара. Появилась мысль использовать для этих целей гусеничную технику с удаленным управлением и визуальным контролем.
В качестве основы был выбран Arduino Mini Pro, программная составляющая - проект Arduino Bluetooth RC Car, в качестве платформы подходящей по весу и размерам - Бархан.
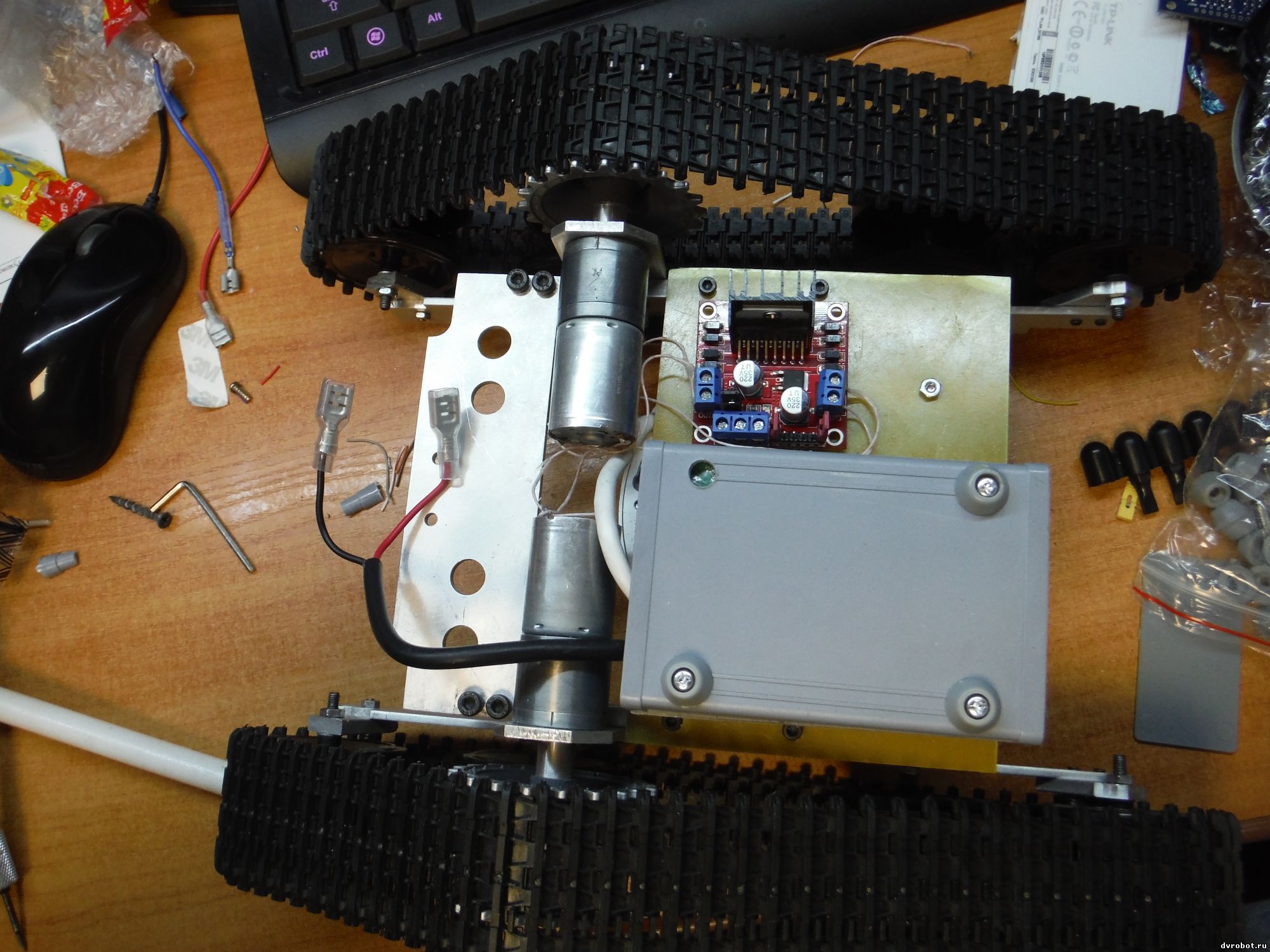
После покупки платформы ее пришлось допиливать напильником для придания ездовых качеств без слетания гусениц и размещения на ней оборудования.
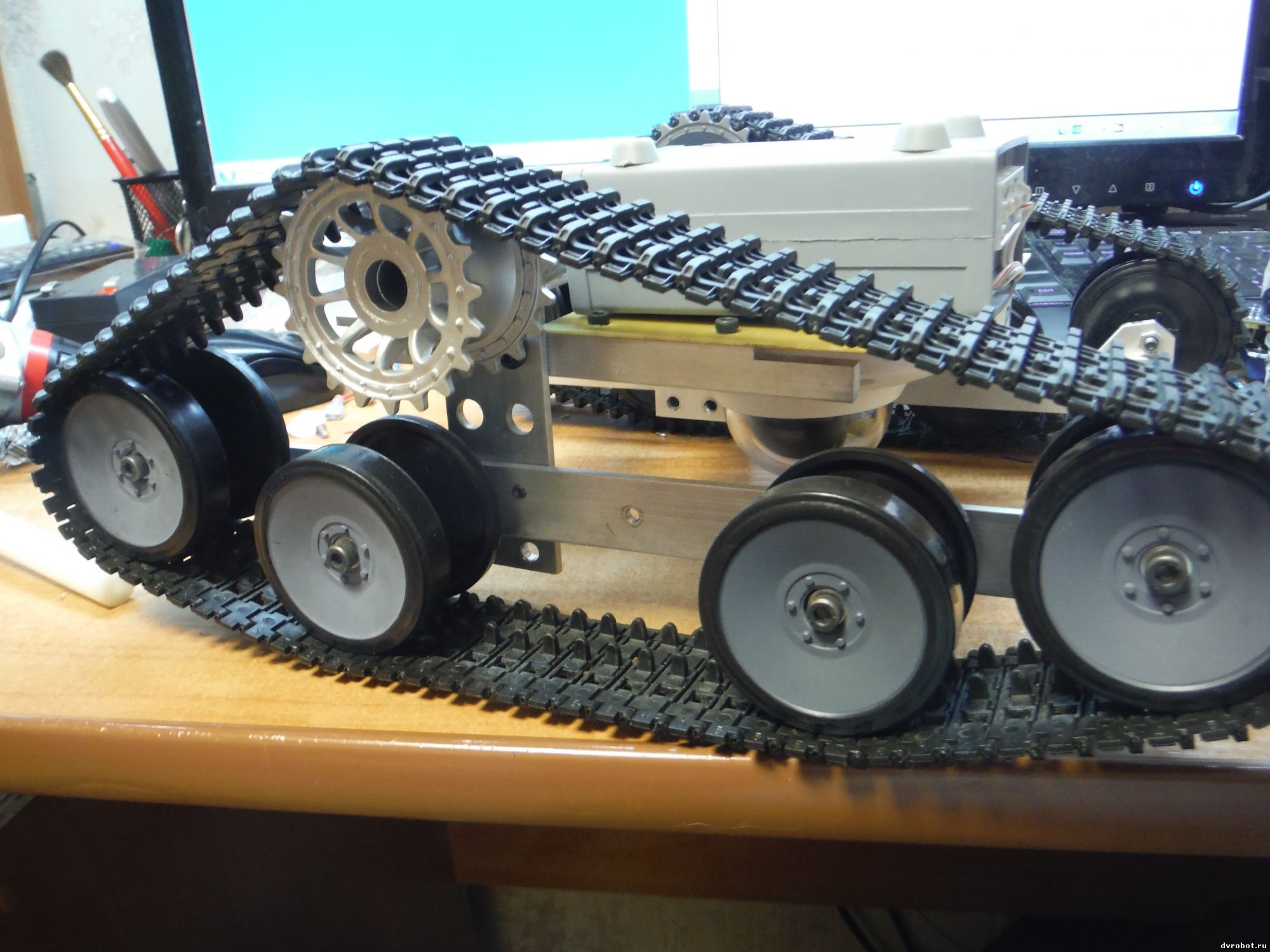
1- Подгон гусениц под одну длину- правая была длиннее - пришлось убрать с одной трек и вклинить во вторую. Штифты выдавливаются толстой иголкой с откусаным кусачками острием.
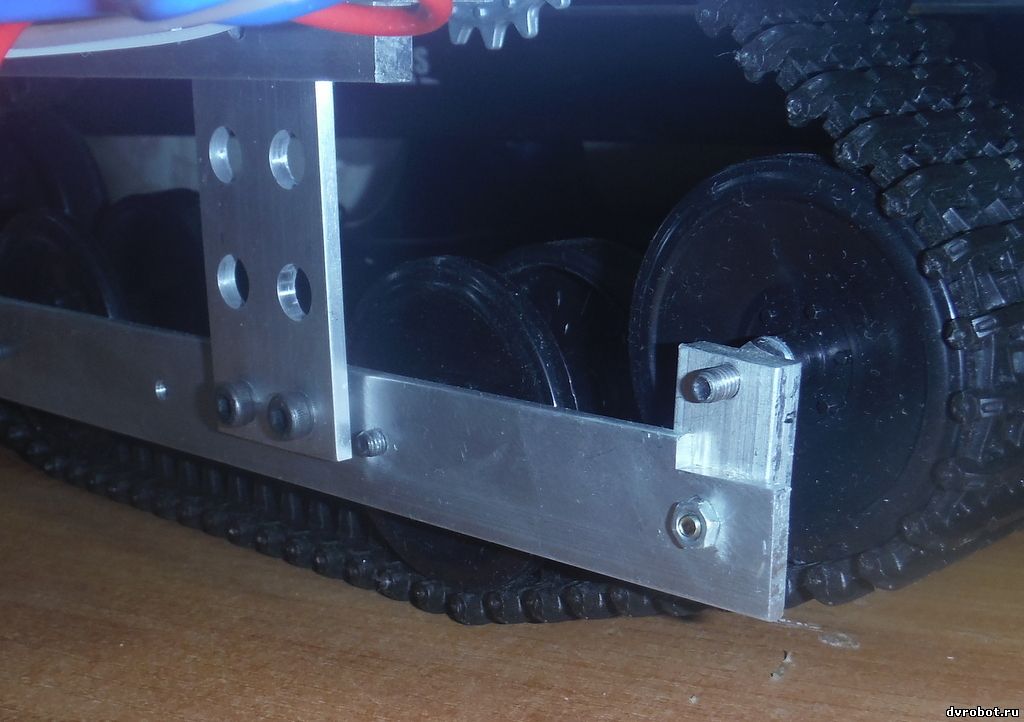
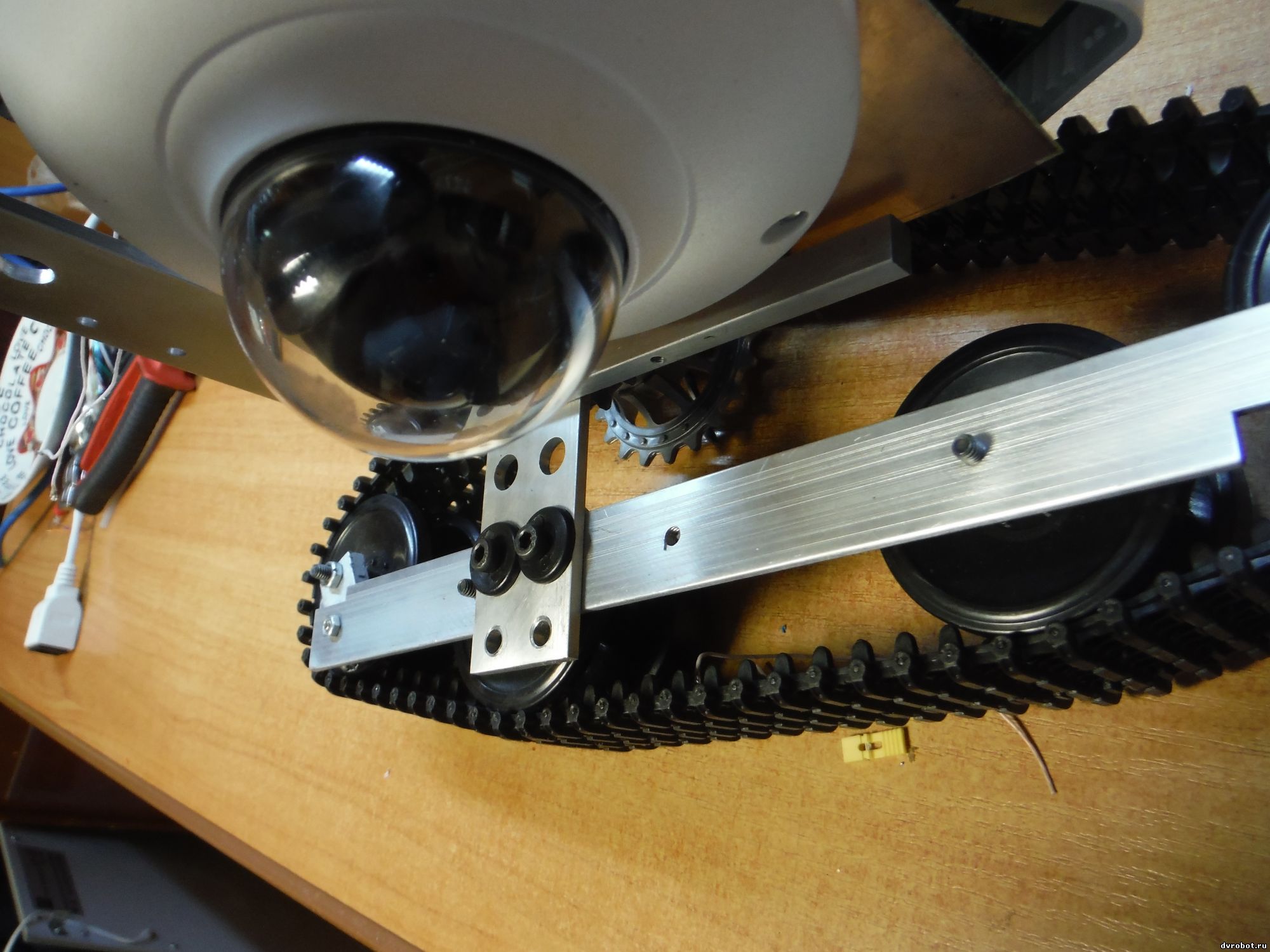
2- Замена переднего ролика. Старый был собран из 2 половинок,которая при тестовом заезде на препятствие отклеилась и гусеница слетела. Плюс он закреплен на простой саморез - держалось прочно , но болт больше внушает доверия.
новый был взят из центра и закреплен через алюминиевую поставку для большей высоты наезда и натяжения гусениц

3- Текстолитовая площадка позволила разместить модуль управления и заклепила разьезжающиеся в разные стороны половинки гусениц. Штатная пластинка алюминия не позволяла закрепить параллельно гусеницы без люфта и смещения

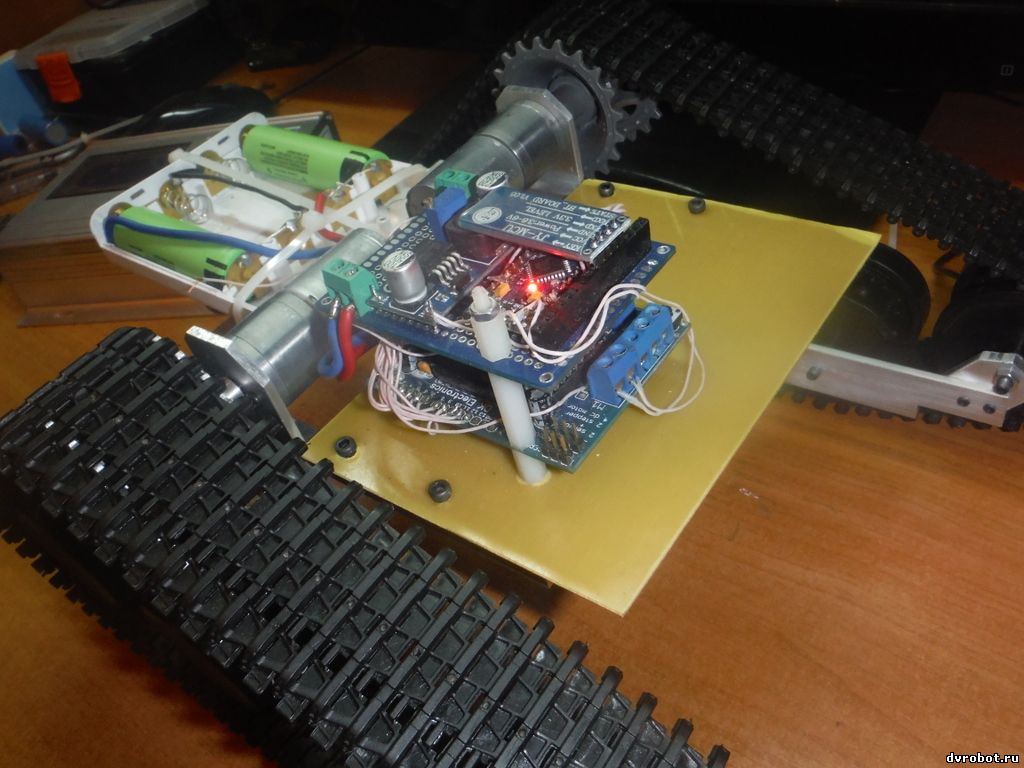
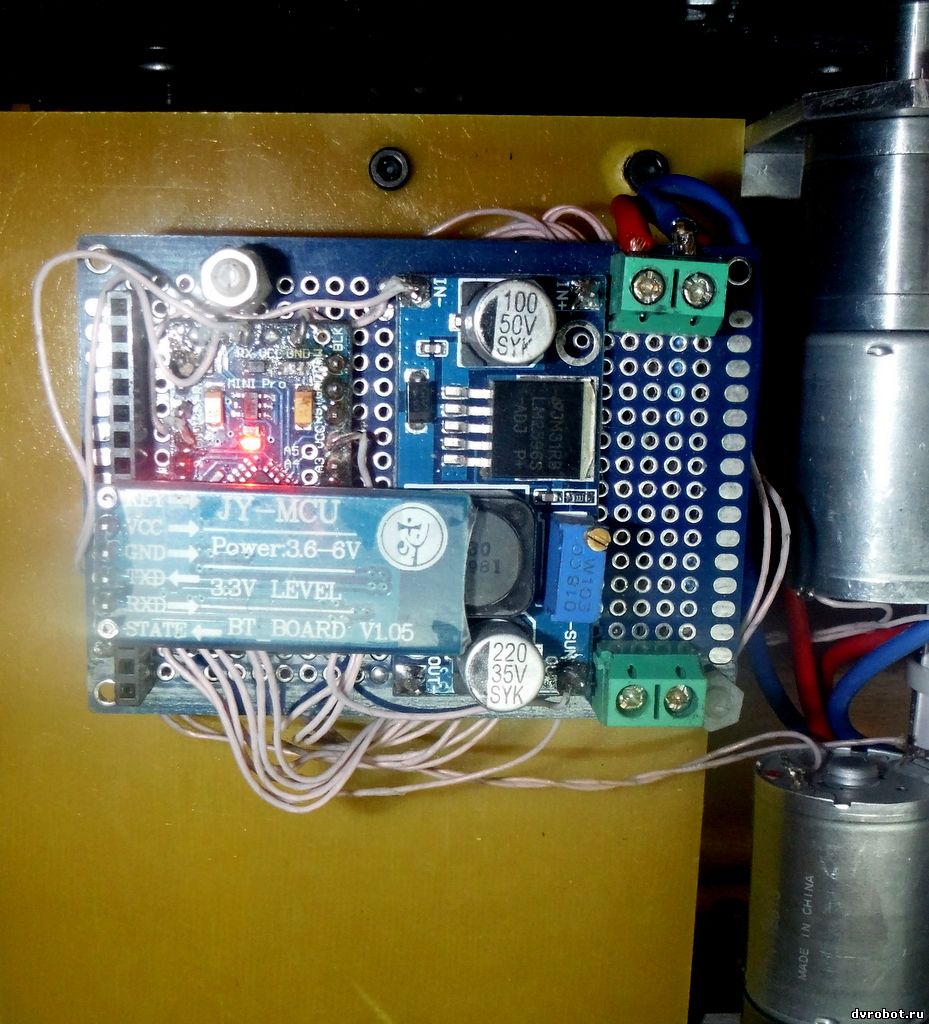
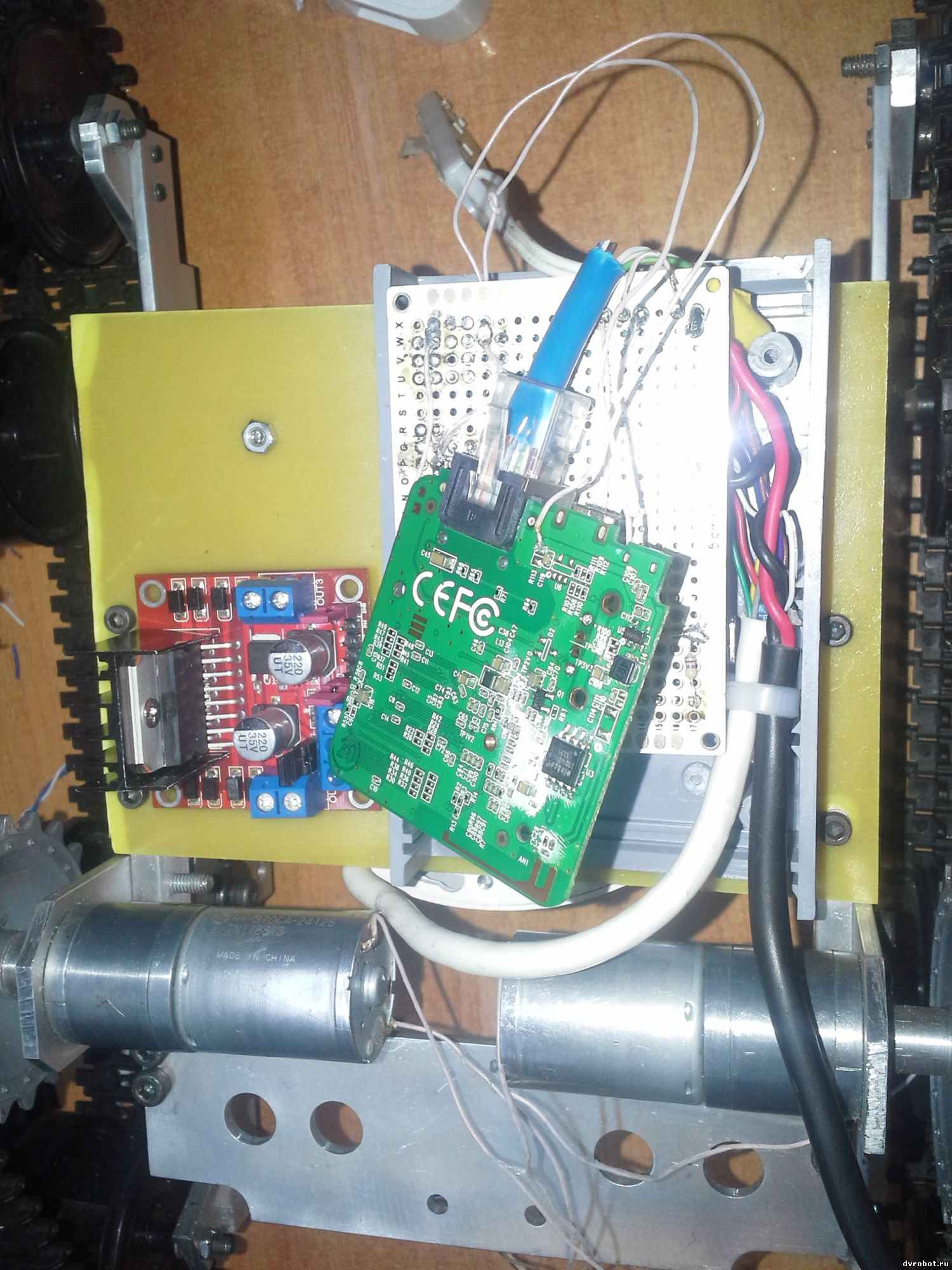
Т.к под рукой был Ардуино про мини, пришлось распаивать провода идущие на мотор-шилд, попутно установив на макетке преобразователь на 5 вольт и разъем для блютуз-модуля.

В тестовом виде питание осуществляется от батарейного блока с 2 литиевыми батарейками 18650, но после установки камеры и WiFi роутера будут стоять гелевые АКБ н 12 вольт 1.2 А\Ч


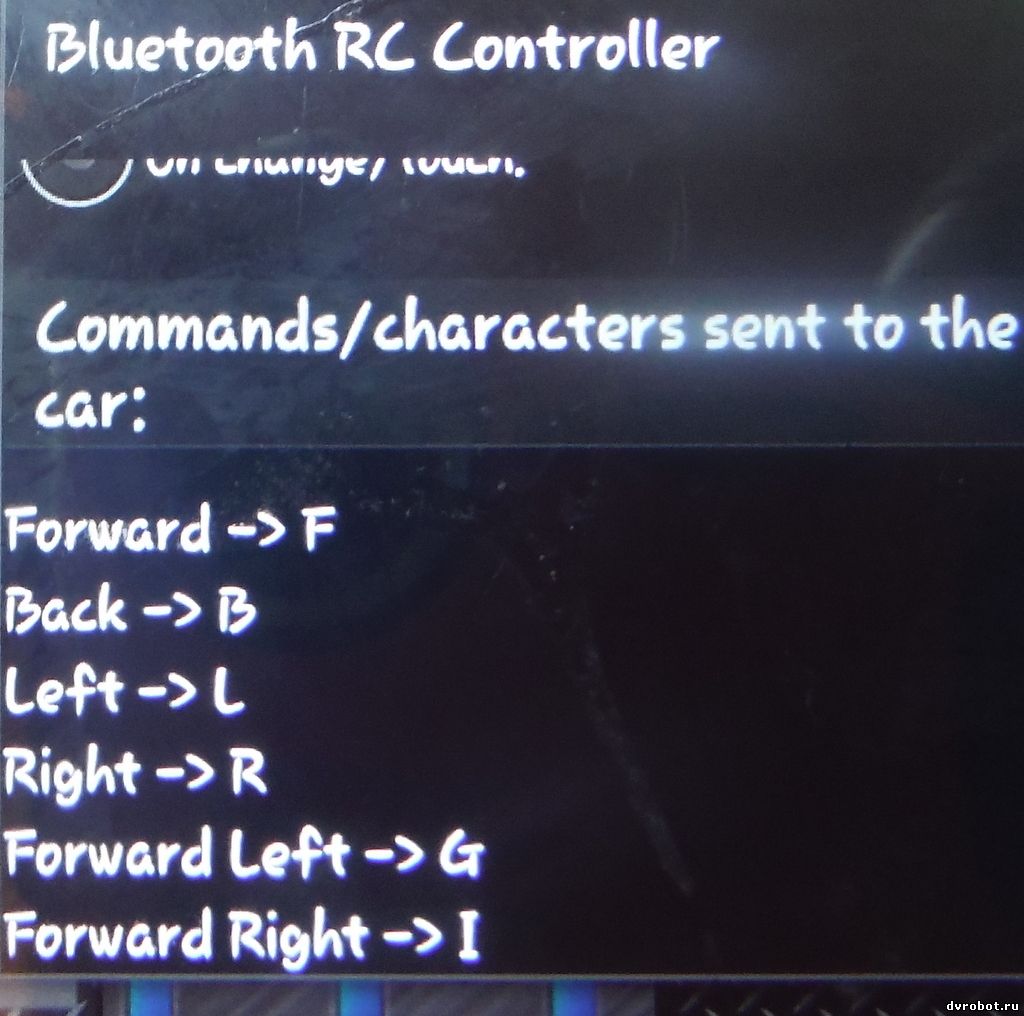
Управлять можно как с телефона, так и с плашета. Программа устанавливается на телефон и выглядит так

Еще вроде как есть возможность управлять с ПК, отправляя буквы (?) но это надо побывать после покупки ЮСБ блютус свистка

продолжение следует...
|
| |
| |
| Trooper_OK | Дата: Суббота, 20.09.2014, 01:17 | Сообщение # 2 |
|
5 Вольт
Группа: Пользователи
Сообщений: 52
Репутация: 20
Статус: Offline
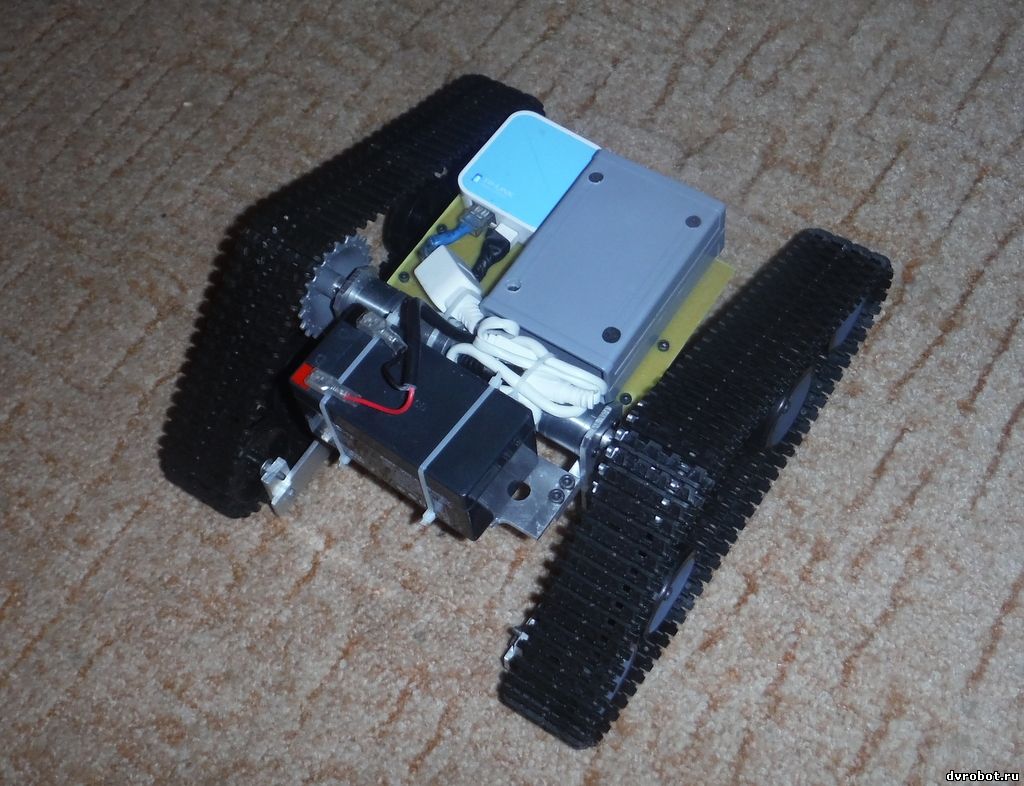
| Продолжаю утяжелять конструкцию. 
Все платы были закрыты в подходящую коробочку

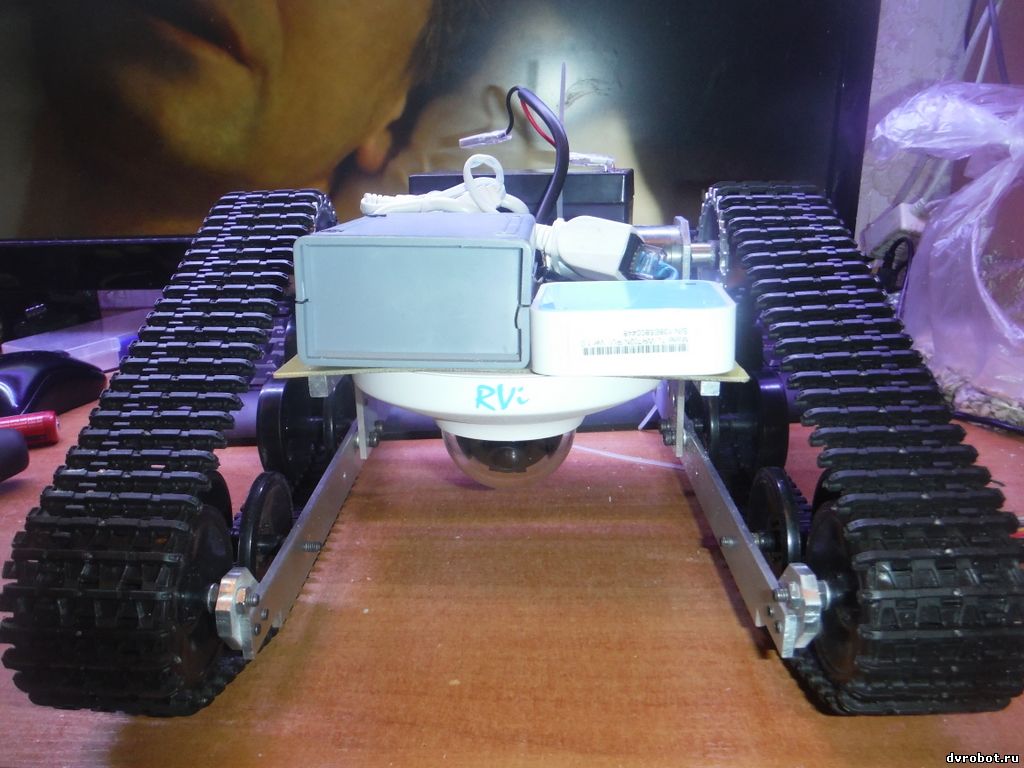
В качестве обзорной камеры была приобретена широкоугольная антивандальная камера,размеры позволили ровно вместить ёё под платой управления.

В качестве роутера - tp-link 702, из за его размеров и стоимости.

АКБ -гелевый ,1.2 А\Ч 12 вольт
для просмотра на ноутбуке была запущена штатная программа для просмотра и записи с камеры

видео тестового заезда
Выявленные недостатки конструкции:
1 -Тормозит видео в 2Мп разрешении, имеет задержку около 3 секунд,из за чего нормально управлять не получается.
Частично решилось выбором вторичного потока- там почти реалтайм, и установки карты памяти в саму камеру для сохранения записи в макс .качестве
2 -Камера без ИК подсветки -надо дополнительное освещение при движении в затемненных пространствах.
3- После 40 минут гонялок и разворачиваний сгорел левый драйвер - или надо ставить радиаторы, или брать шилд более мощный и переделывать схему.
4 Нет креплений для АКБ- при замене придеться резать стяжки.
5. Малый радиус у блютуса на телефоне.В соседней комнате уже не берет. Временно решилось установкой программы на планшет - в пределах квартиры брало везде.
плюсы
1- на 12 вольтах очень шустро крутит гусеницы- скорость сравнима с быстрым шагом (~ 6-7 кмч)
2- Конструкция притягивает взгляды не только мальчишек во дворе,но и их пап)
продолжение следует...
Сообщение отредактировал Trooper_OK - Суббота, 20.09.2014, 01:19 |
| |
| |
| Trooper_OK | Дата: Суббота, 27.09.2014, 12:05 | Сообщение # 3 |
|
5 Вольт
Группа: Пользователи
Сообщений: 52
Репутация: 20
Статус: Offline
| Доброго времени суток !
Для проверки работы в реальных условиях решено было запустить платформу под подвесным потолком в магазине.
Для подсветки был исполосован светодиодный модуль 0.6 ватта,включенный паралельно АКБ и приклеенный на переднюю часть платформы.
В качестве защиты от перегрева микросхем шилда были наклеены на них алюминиевые радиаторы ( помогло мало кстати)
Перечень вновь выявленных недочетов:
1 -малая тяга с места при наезде на препятствии.
2- высота не позволяет проехать между лампой и потолком.
3- большой вес, из за чего при редком расположении крючков-зацепов потолка происходит прогибание направляющих.
Что сделано:
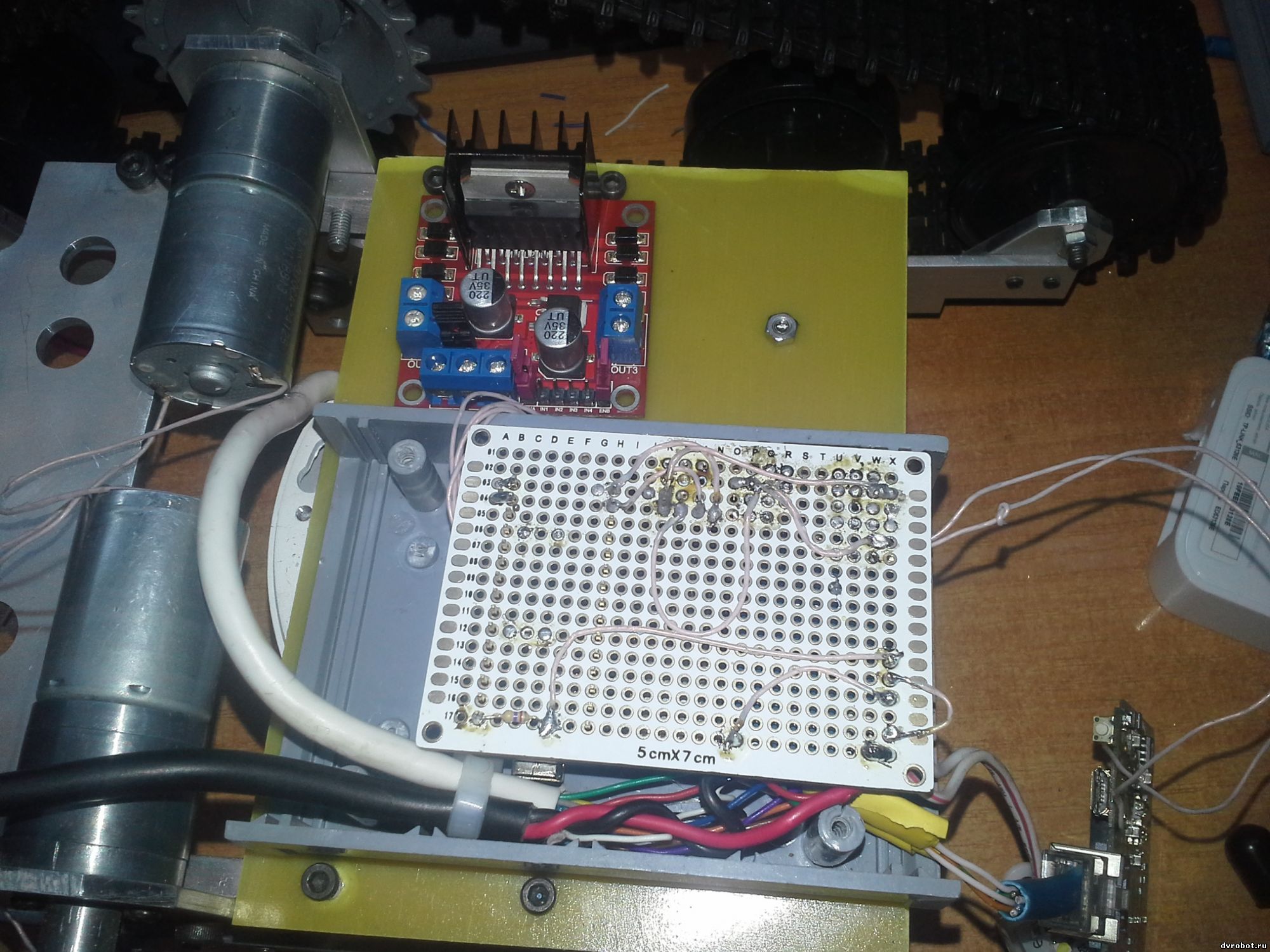
Была заказан драйвер мини на 2 А (http://dvrobot.ru/237/221.html), но при попытке его состыковать ничего не получилось. Разные режимы и логика работы. 
Решено было поменять программу управления и заодно окультурить висящие "сопли".
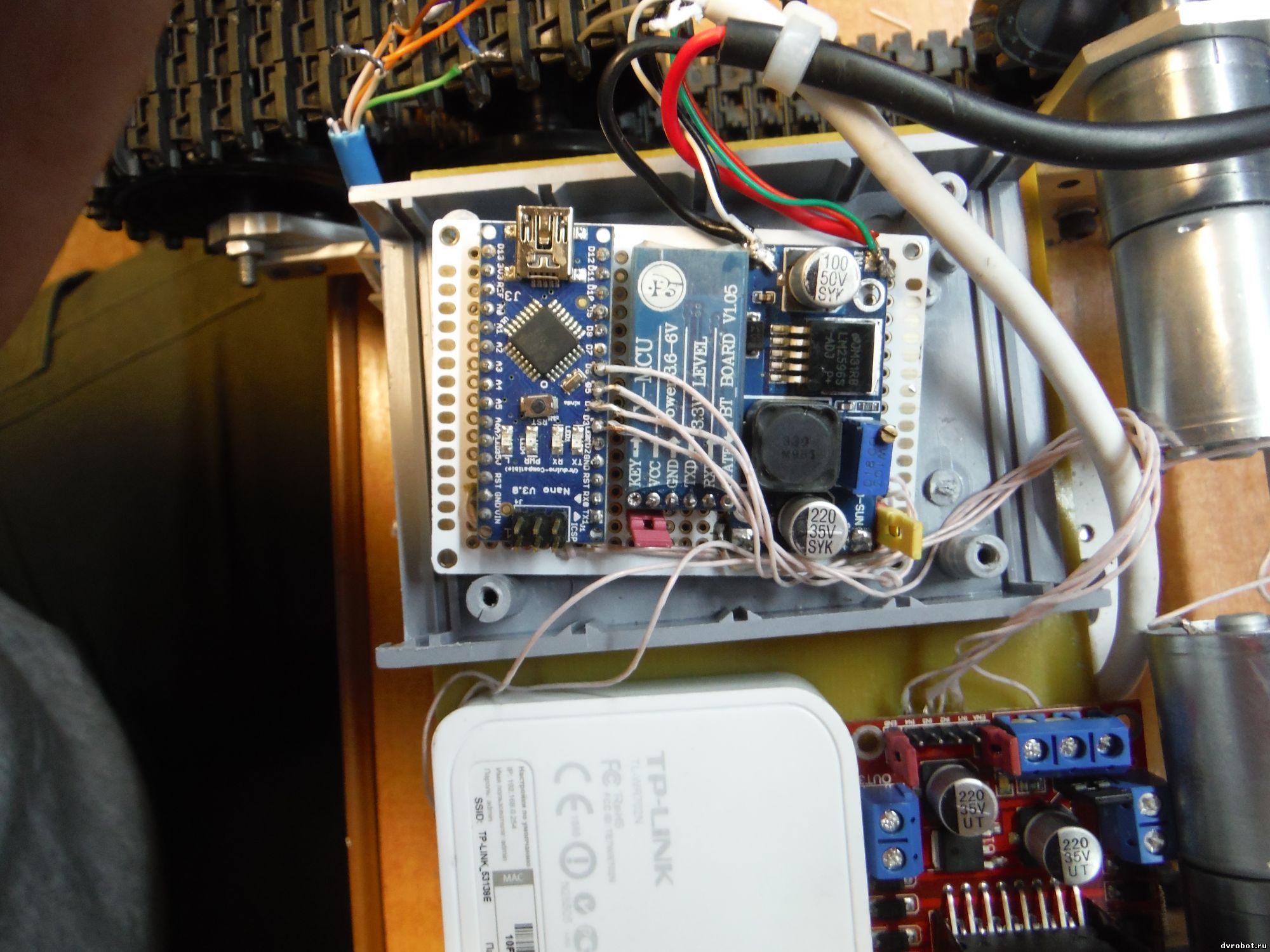
После поисков остановился на программе CXEM Car 1.3.
На новой макетной плате были установлены платы преобразователя, блютуса и ардуино нано.

Для возможности програмирования платы ардуино питание блютус модуля тоже сделано отключаемым

Что бы все вместилось в коробочку,был разобран WiFi роутер и отрезаны разьемы на камере.
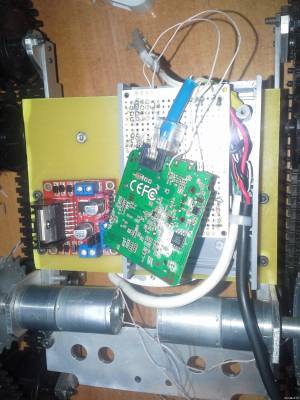
Питание на роутер теперь шло через перемычку, что бы можно было отключать когда он не нужен.
В камере стоит флеш карта для автономной записи, так что видео всегда сохраняется.
Драйвер закреплен на термоклей,посмотрим,насколько его хватит

В новой программе выведено управление 13 пином,для удаленного включение-выключения сигнала.
Я через IRF530 вывел управление светом, т.к он не всегда нужен, а батарейка не безлимитная.

Занизить платформу без особых переделок получилось опусканием на 1 деление крепежных планок

что из этого получилось

продолжение следует
Сообщение отредактировал Trooper_OK - Суббота, 27.09.2014, 12:26 |
| |
| |
| Trooper_OK | Дата: Вторник, 30.09.2014, 01:01 | Сообщение # 4 |
|
5 Вольт
Группа: Пользователи
Сообщений: 52
Репутация: 20
Статус: Offline
| Первая сотня метров кабеля протянута 
Все таки управление с планшета через блютус выявило кучу неудобств.
1- маленький радиус действия, постоянно приходиться передвигаться и таскать с собой ноутбук
2- "неосязаемое" управление - смотреть на экран планшета и одновременно наблюдать картинку с ноутбука неудобно, и платформа норовит уехать то вправо ,то влево.Нет уверенного вождения в "слепую".
3-при дисконекте блютус соединения приходиться перегружать или программу или планшет или и то и другое.Иначе "сокет фалед"
Буду думать в сторону автономного пультика на аналоговых джойстиках (типа такого http://dvrobot.ru/238/456.html)
и передатчиков (http://dvrobot.ru/238/433.html). Осталось придумать скетчи для этого всего добра.
|
| |
| |
| Trooper_OK | Дата: Вторник, 07.10.2014, 23:00 | Сообщение # 5 |
|
5 Вольт
Группа: Пользователи
Сообщений: 52
Репутация: 20
Статус: Offline
| Доброго времени дня\ночи!
По ходу продвижения кабелей под потолком были решены и всплыли проблемы и решения
1- Были приобретены аналоговые джойстики и переписан скетч для дуины- что бы была возможность управлять двигателями "вживую". Были использованы 2 джойстика и показания снимались только с осей Y
Примеры кода были найдены в сети и немного доработаны
const int POS_Y_PIN = A0; // Горизонтальное положение джойстика (аналоговый пин)
const int POS_X_PIN = A1; // Вертикальное положение джойстика (аналоговый пин)
const int ENABLE_A = 9; // Включение 1 движка (цифровой пин ШИМ)
const int ENABLE_B = 3; // Включение 2 движка (цифровой пин ШИМ)
const int INPUT_1 = 7; // Поворот 1 движка (цифровой пин)
const int INPUT_2 = 6; // Поворот 1 движка (цифровой пин)
const int INPUT_3 = 5; // Поворот 2 движка (цифровой пин)
const int INPUT_4 = 4; // Поворот 2 движка (цифровой пин)
const int SWITCH = 8; // Кнопка джойстика
const int MAX_POS = 1023; // VRx и VRy выдают значения от 0 до 1023
const int MAX_ANGLE = 180; // Джойстик отклоняется на угол 0..180
const int MAX_VALUE = 255; // Максимальное подаваемое на ШИМ значение
const int START_VALUE = 20; // Начальное подаваемое на ШИМ значение
int LIGHT = 13; // освещение подключенное к 13 пину
void setup()
{
Serial.begin(9600);
pinMode(ENABLE_A, OUTPUT);
pinMode(ENABLE_B, OUTPUT);
pinMode(INPUT_1, OUTPUT);
pinMode(INPUT_2, OUTPUT);
pinMode(INPUT_3, OUTPUT);
pinMode(INPUT_4, OUTPUT);
pinMode(SWITCH, INPUT);
pinMode(POS_Y_PIN, INPUT);
pinMode(POS_X_PIN, INPUT);
pinMode(LIGHT, OUTPUT);
}
void loop()
{
// Вычисляем угол поворота джойстика
int yVal = analogRead(POS_Y_PIN);
int xVal = analogRead(POS_X_PIN);
float yAngle = 1.0 * yVal * MAX_ANGLE / MAX_POS; // Переводим выходные данные VRy в угол наклона джойстика (от 0 до 180)
float xAngle = 1.0 * xVal * MAX_ANGLE / MAX_POS; // Аналогично VRx
int startValue = 150;
Serial.print(xAngle);
Serial.print(" ");
Serial.println(yAngle);
// Если джойстик в иначально положении (90 градусов с погрешностью 5)
if (xAngle > 85 && xAngle < 95)
{
// Выключаем движки
analogWrite(ENABLE_A, 0);
analogWrite(ENABLE_B, 0);
digitalWrite(INPUT_1, LOW);
digitalWrite(INPUT_2, LOW);
digitalWrite(INPUT_3, LOW);
digitalWrite(INPUT_4, LOW);
digitalWrite(LIGHT, 200);//включаем освещение ,Яркость ШИМ 200
// Если джойстик отклонен влево
} else if (xAngle <= 85)
{
// Включаем движок
digitalWrite(INPUT_1, HIGH);
digitalWrite(INPUT_2, LOW);
int value = 0;
xAngle = 85 - xAngle;
// Подаем на ШИМ значение в зависимости от угла отклонения
float shift = 1.0 * (MAX_VALUE - START_VALUE) / 85 * xAngle;
analogWrite(ENABLE_A, START_VALUE + shift);
Serial.print("ValueX1 = ");
Serial.println(START_VALUE + shift);
// Если джойстик отклонен вправо, действуем аналогично
} else
{
digitalWrite(INPUT_1, LOW);
digitalWrite(INPUT_2, HIGH);
int value = 0;
xAngle = xAngle - 95;
float shift = 1.0 * (MAX_VALUE - START_VALUE) / 85 * xAngle;
analogWrite(ENABLE_A, START_VALUE + shift);
Serial.print("ValueY1 = ");
Serial.println(START_VALUE + shift);
}
// Аналогично для 2 движка и вертикального отклонения джойстика
if (yAngle > 85 && yAngle < 95)
{
analogWrite(ENABLE_B, 0);
} else if (yAngle <= 85)
{
digitalWrite(INPUT_3, HIGH);
digitalWrite(INPUT_4, LOW);
int value = 0;
yAngle = 85 - yAngle;
float shift = 1.0 * (MAX_VALUE - START_VALUE) / 85 * yAngle;
analogWrite(ENABLE_B, START_VALUE + shift);
Serial.print("ValueX2 = ");
Serial.println(START_VALUE + shift);
} else
{
digitalWrite(INPUT_3, LOW);
digitalWrite(INPUT_4, HIGH);
int value = 0;
yAngle = yAngle - 95;
float shift = 1.0 * (MAX_VALUE - START_VALUE) / 85 * yAngle;
analogWrite(ENABLE_B, START_VALUE + shift);
Serial.print("ValueY2 = ");
Serial.println(START_VALUE + shift);
}
delay(100);
}
Управление пока по проводам которые тянет сам "танк",т.к не придумал как через беспроводные модули передавать команды.
Резисторы в регуляторах линейные- и регулировка скорости от 0 до 100% происходит в первые 10-15 градуса положения вперед или назад. Надо будет сделать программно аналог логарифмической зависимости положения джойстика и выдаваемых результатов,иначе сложно поймать границу между "еле едем" и "рвем гусеницы")
2. Развалилась шестерня внутри редуктора - для чего был заказан новый комплект с пониженными п.ч (стоимость платформы плавно переросла 10 к.Р)
3. Замена АКБ на литиевые батареи эффекта не принесла - т.к из за более легкого веса перестала тянуть провод длинною более 10 метров.Оставил АКБ 1.2 АЧ
4. От блютуса решено отказаться в пользу WiFi/UART на роутере TP Link 3020 и альтернативной прошивкой.
Для управления друг пишет программу для вывода изображения IP камеры и управления с клавиатуры\внешнего джойстика в едином окошке  .Но это надо время. .Но это надо время.
5.Развалился пластиковый каток,лечение через супер-клей ...
Вывод -для профф.использования надо было брать полностью алюминиевую платформу с металлическими катками.
Сообщение отредактировал Trooper_OK - Вторник, 07.10.2014, 23:04 |
| |
| |
| GRACH | Дата: Вторник, 21.10.2014, 02:07 | Сообщение # 6 |
 dvrobot.ru
Группа: Администраторы
Сообщений: 111
Репутация: 16181
Статус: Offline
| Цитата Для управления друг пишет программу для вывода изображения IP камеры и управления с клавиатуры\внешнего джойстика в едином окошке .Но это надо время.
Вот это, будем ждать с нетерпением!!
По части комплектующих пластмассовых, напишите список чего нужно ( на dvrobot@yandex.ru ). Мы вам привезем, бесплатно.....хорошо пишите тут, о своем проекте.
|
| |
| |
| Trooper_OK | Дата: Вторник, 21.10.2014, 19:34 | Сообщение # 7 |
|
5 Вольт
Группа: Пользователи
Сообщений: 52
Репутация: 20
Статус: Offline
| Спасибо за интерес к проекту! Текущие монтажи с помощью платформы закончены,настало время работы над ошибками!
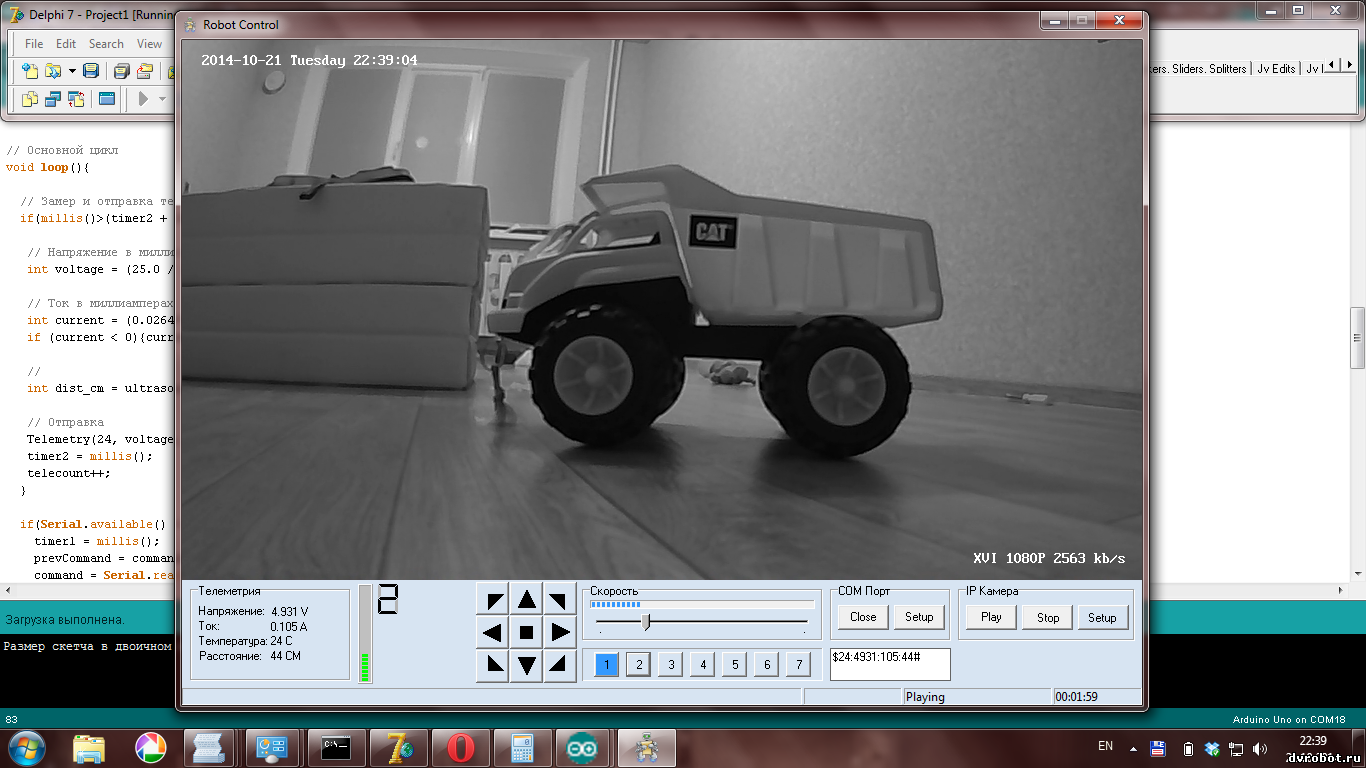
Текущее состояние проекта такое - канал передачи данных управления,видео и телеметрии с на бортных датчиков решили сделать только WiFi ,роутер был поменян на TP-Link 3020 из за распаянного UART на плате.Программа написана в бета-версии, управление с клавиатуры клавишами WASD или стрелками на цифровом блоке клавиатуры.
Сама гусеничная платформа тоже немного была "модифицированна".
Чуть позже сделаю полноценный отчет с скриншотами программы и фотографиями.
|
| |
| |
| Trooper_OK | Дата: Вторник, 21.10.2014, 22:44 | Сообщение # 8 |
|
5 Вольт
Группа: Пользователи
Сообщений: 52
Репутация: 20
Статус: Offline
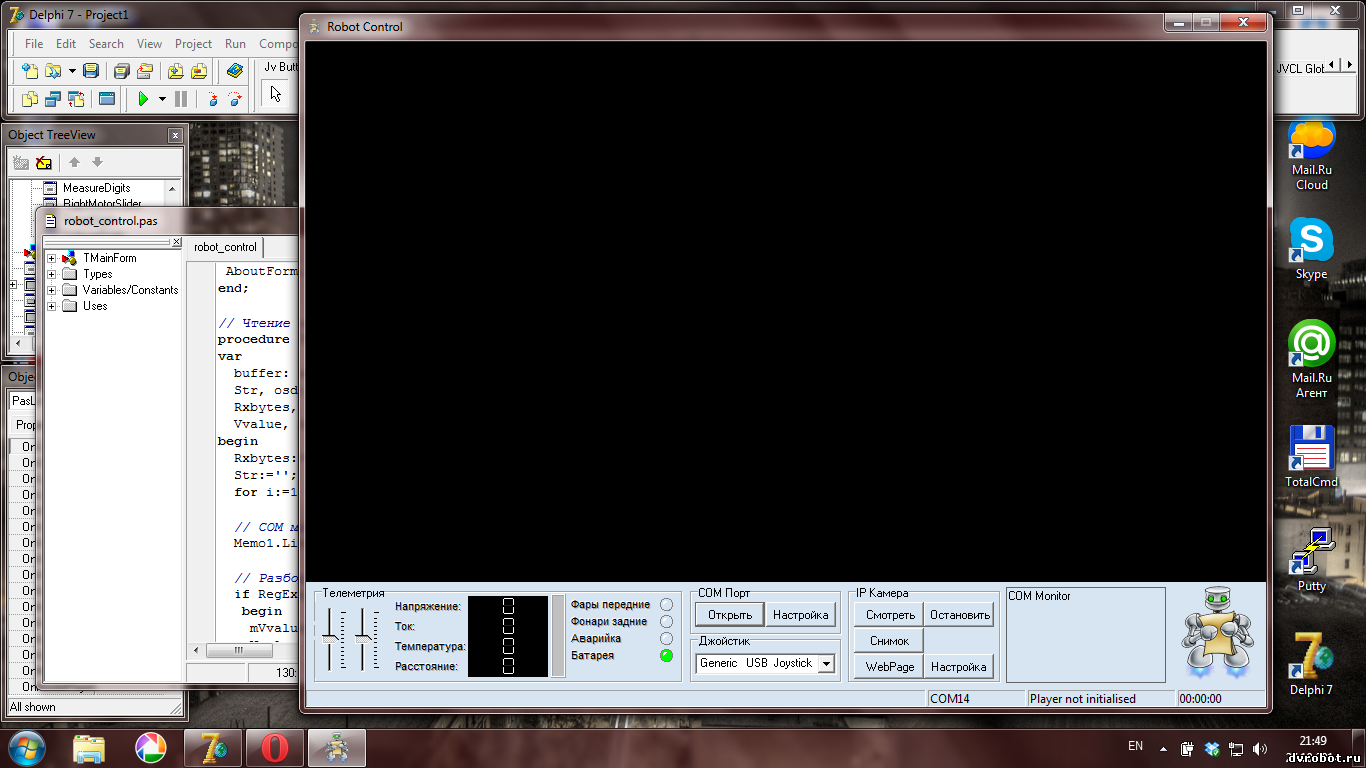
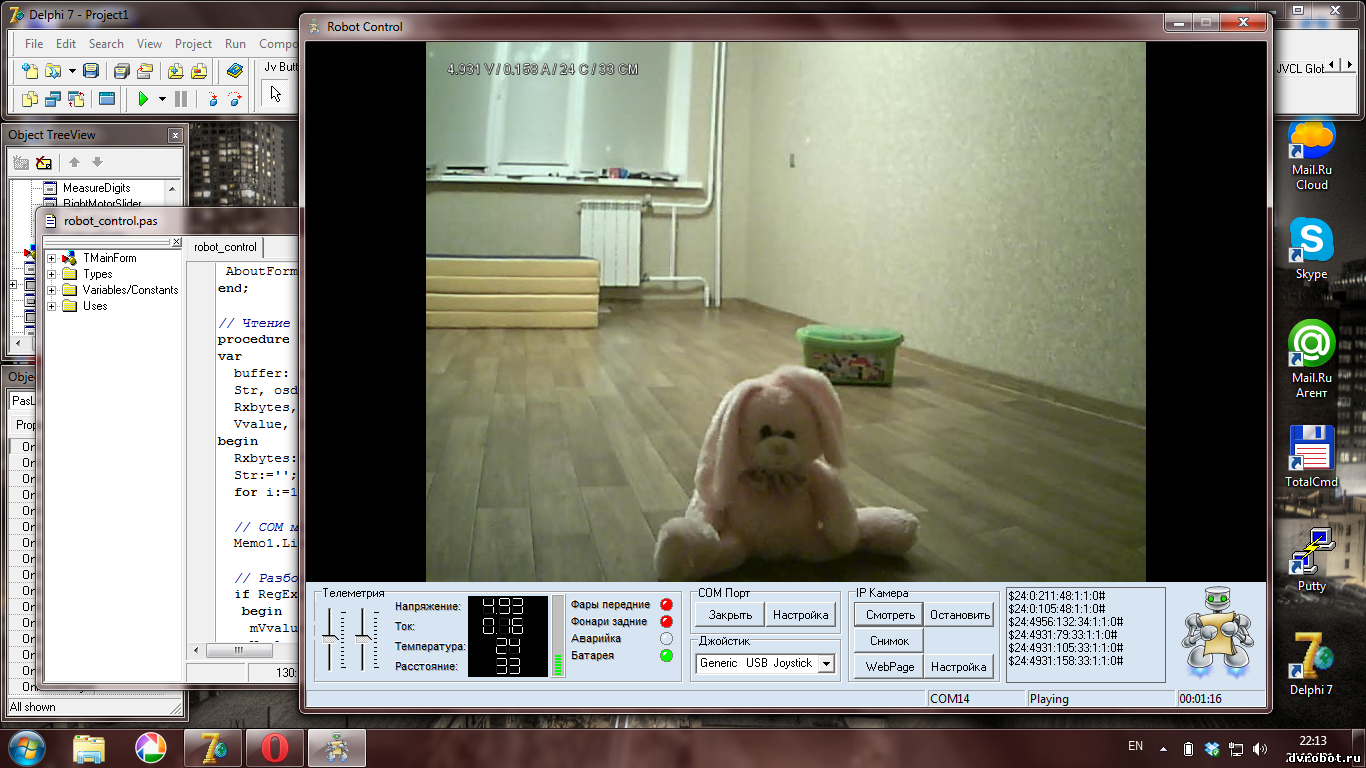
| Общий вид программы -с лева на право - данные с датчиков телеметрии на платформе, граф. колонка скорости,управление,переключение ШИМ регулятора скорости,чуть ниже клавиши включения реле на платформе(свет и тп) , настройки виртуального порта ,настройки IP камер,поддерживаются пока 3 производителя,но можно будет догрузить Activx компонеты для камер.

Сообщение отредактировал Trooper_OK - Вторник, 21.10.2014, 22:51 |
| |
| |
| Trooper_OK | Дата: Понедельник, 27.10.2014, 22:45 | Сообщение # 9 |
|
5 Вольт
Группа: Пользователи
Сообщений: 52
Репутация: 20
Статус: Offline
| Новые версии Robot_control_v3
Доступно только для пользователей
и скетча для ардуино
Доступно только для пользователей

Изменения в программе - от кнопок и сочетания wasd отказались в пользу аналоговых джойстиков подключаемых по USB.
Настройки сохраняются в внешнем файле .INI
robot_control_v3

Сообщение отредактировал Trooper_OK - Вторник, 28.10.2014, 01:01 |
| |
| |
| konstantin | Дата: Вторник, 28.10.2014, 19:51 | Сообщение # 10 |
 1.5 Вольт
Группа: Пользователи
Сообщений: 6
Репутация: 0
Статус: Offline
| Круто! А я пока вникаю в платформу да руку набиваю.
|
| |
| |
| Trooper_OK | Дата: Вторник, 28.10.2014, 20:00 | Сообщение # 11 |
|
5 Вольт
Группа: Пользователи
Сообщений: 52
Репутация: 20
Статус: Offline
| Главное определиться для чего она тебе- и где она будет бывать...
А там уже и датчики можно подобрать и писать под них конкретно)
|
| |
| |
| rover13 | Дата: Среда, 29.10.2014, 06:01 | Сообщение # 12 |
 1.5 Вольт
Группа: Пользователи
Сообщений: 1
Репутация: 0
Статус: Offline
| А не дешевле было бы использовать вместо IPишки вебкамеру, например C310 и прошивку для mr3020 от cyberwrt?
|
| |
| |
| Trooper_OK | Дата: Среда, 29.10.2014, 08:35 | Сообщение # 13 |
|
5 Вольт
Группа: Пользователи
Сообщений: 52
Репутация: 20
Статус: Offline
| Может быть чуть чуть дешевле, но!
1- угол обзора у IP шире
2- алюминиевое основание + антивандальный поликарбонат прочнее АБС пластика,да и настройки поворота под куполом не собьются..А вот пластиковая клипса кажется хлипковатой
3- на форумах очень много вопросов к стабильности изображения в связке юсб камера-роутер + ограничения по отображению картинки в приемном устройстве. Т.Е только в вебинтерфейсе роутера.А с IP я могу хоть на планшете, хоть на телефоне хоть куда и на чем )
UPD: А разрешение с вебки ограничено разрешением 320*240 с 15FPS если не ошибаюсь...до 2 Мп далеко )
Сообщение отредактировал Trooper_OK - Среда, 29.10.2014, 20:09 |
| |
| |
| Trooper_OK | Дата: Среда, 29.10.2014, 22:08 | Сообщение # 14 |
|
5 Вольт
Группа: Пользователи
Сообщений: 52
Репутация: 20
Статус: Offline
| Доброго времени суток!
Выкладываю фото очередных доделок платформы, от которой кстати мало что осталось.
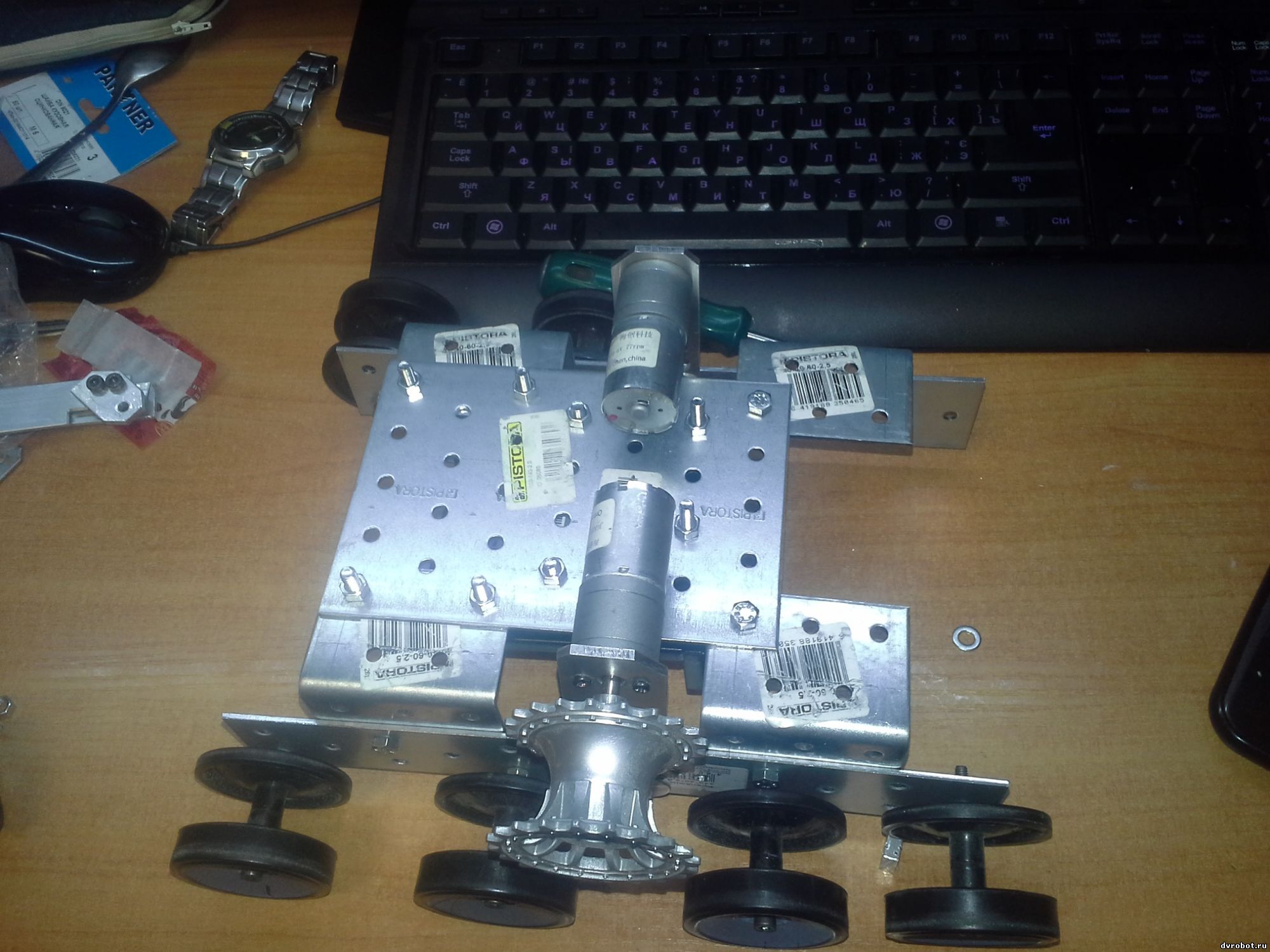
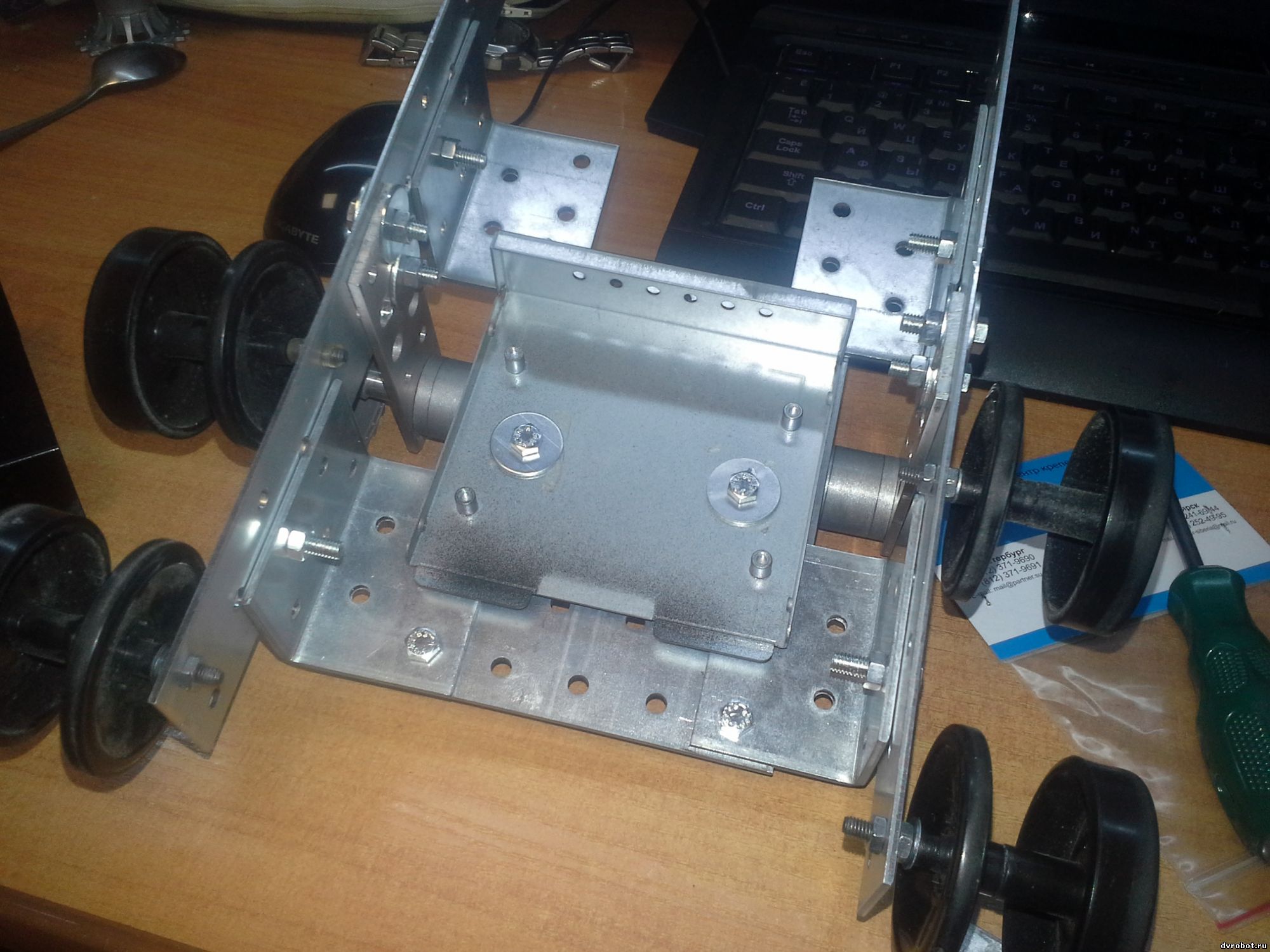
Для усиления жесткости и прочности решил немного переделать раму и пожертвовать весом - в магазине анкер были куплены полоски и уголки из оцинковки и пакетики с болтами-шайбами и гайками.
Перебрав около двух десятков вариантов по принципу детского конструктора примерно обрисовалась конструкция новой базы


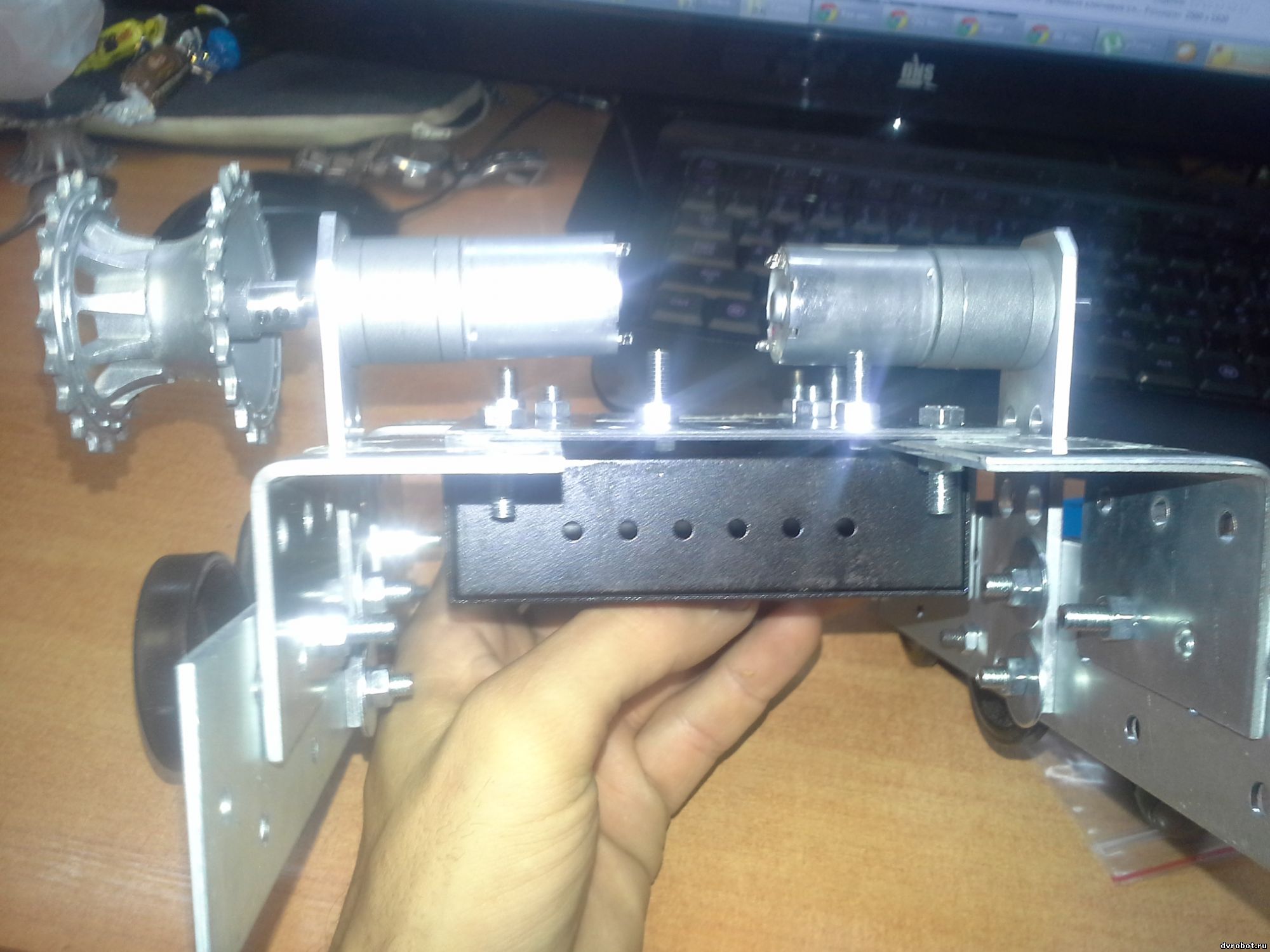
для размещения электроники идеально подошёл металлический корпус от коммутатора DLINK 1005. Плюс крепления совпали ровно по центру

придумываю как разместить камеру и съемное крепление для АКБ.
Хотя пока проще стяжек пластиковых ничего не придумал (

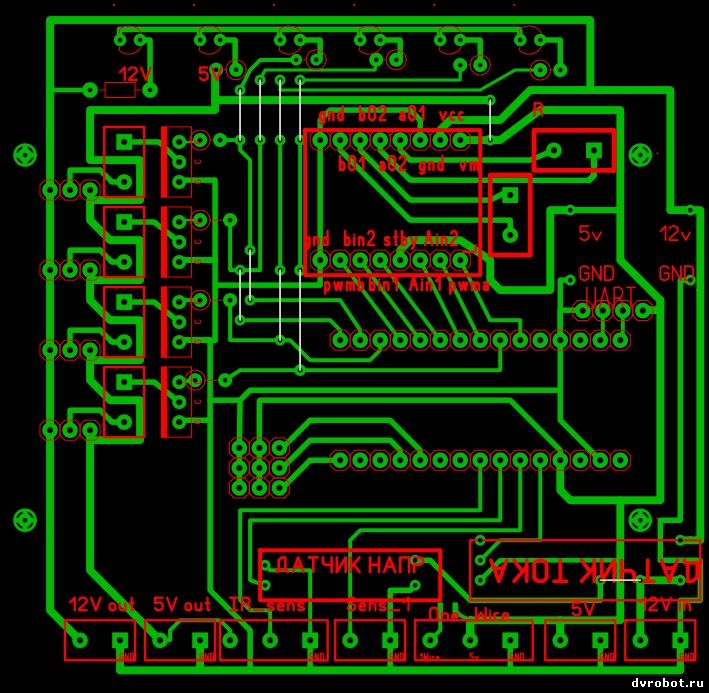
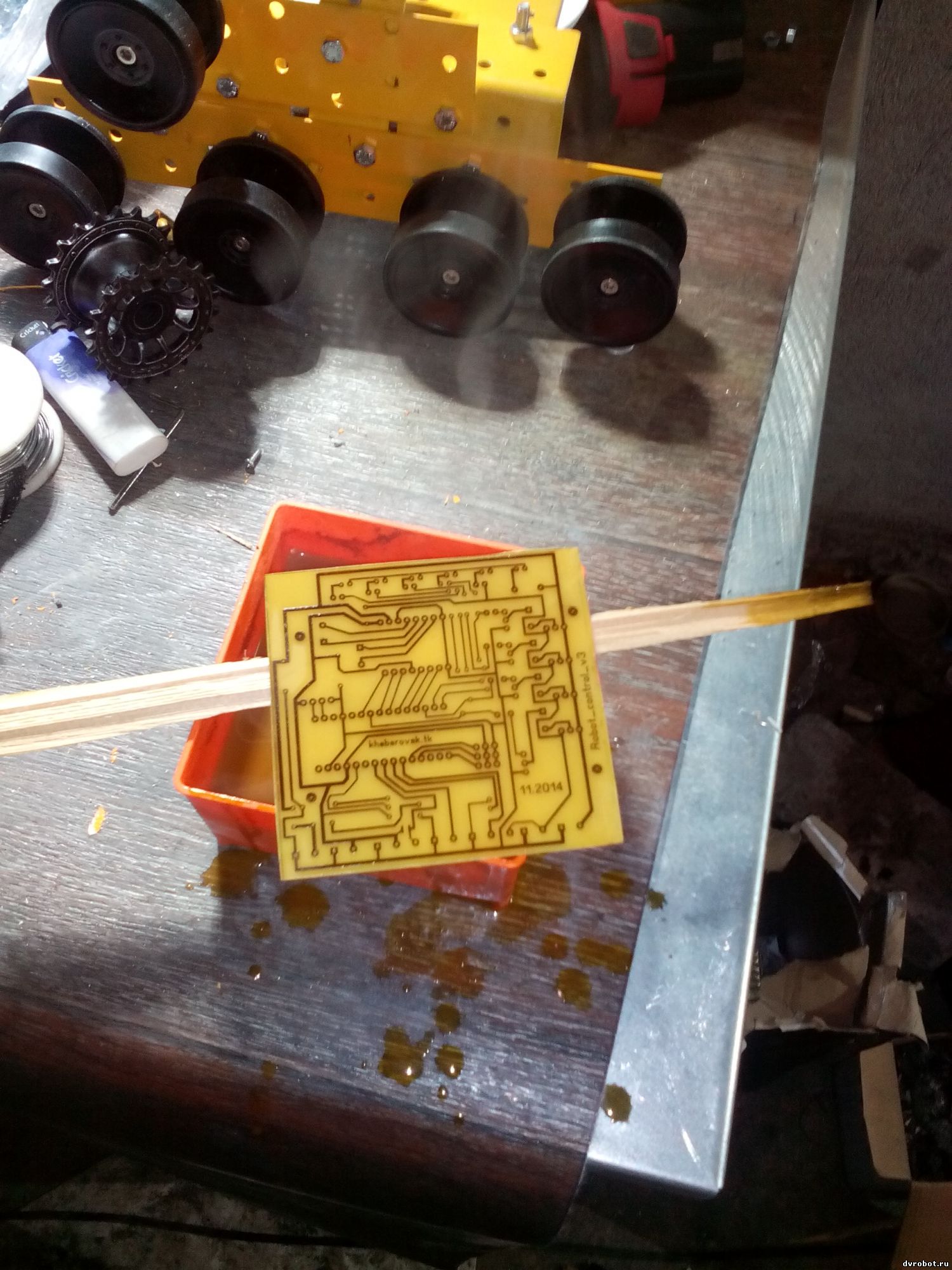
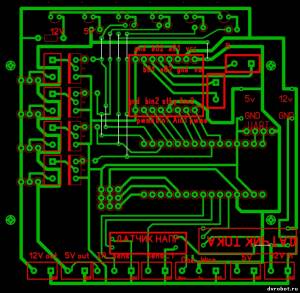
Шилды не вмещались по высоте и в данный момент делаю печатную плату для размещения в корпусе роутера с разведенной атмегой и L298+стабилизатор 5 вольт+ датчики.
По количеству выводов плата проситься быть 2-х сторонней, но опыт подсказывает что надо стремиться к односторонности для упрощения изготовления и совмещения отверстий.
Продолжение следует.....
|
| |
| |
| Trooper_OK | Дата: Пятница, 28.11.2014, 23:24 | Сообщение # 15 |
|
5 Вольт
Группа: Пользователи
Сообщений: 52
Репутация: 20
Статус: Offline
| Доброго времени суток !
Продолжаем доводить до "ума" и совершенства нашу машинку)
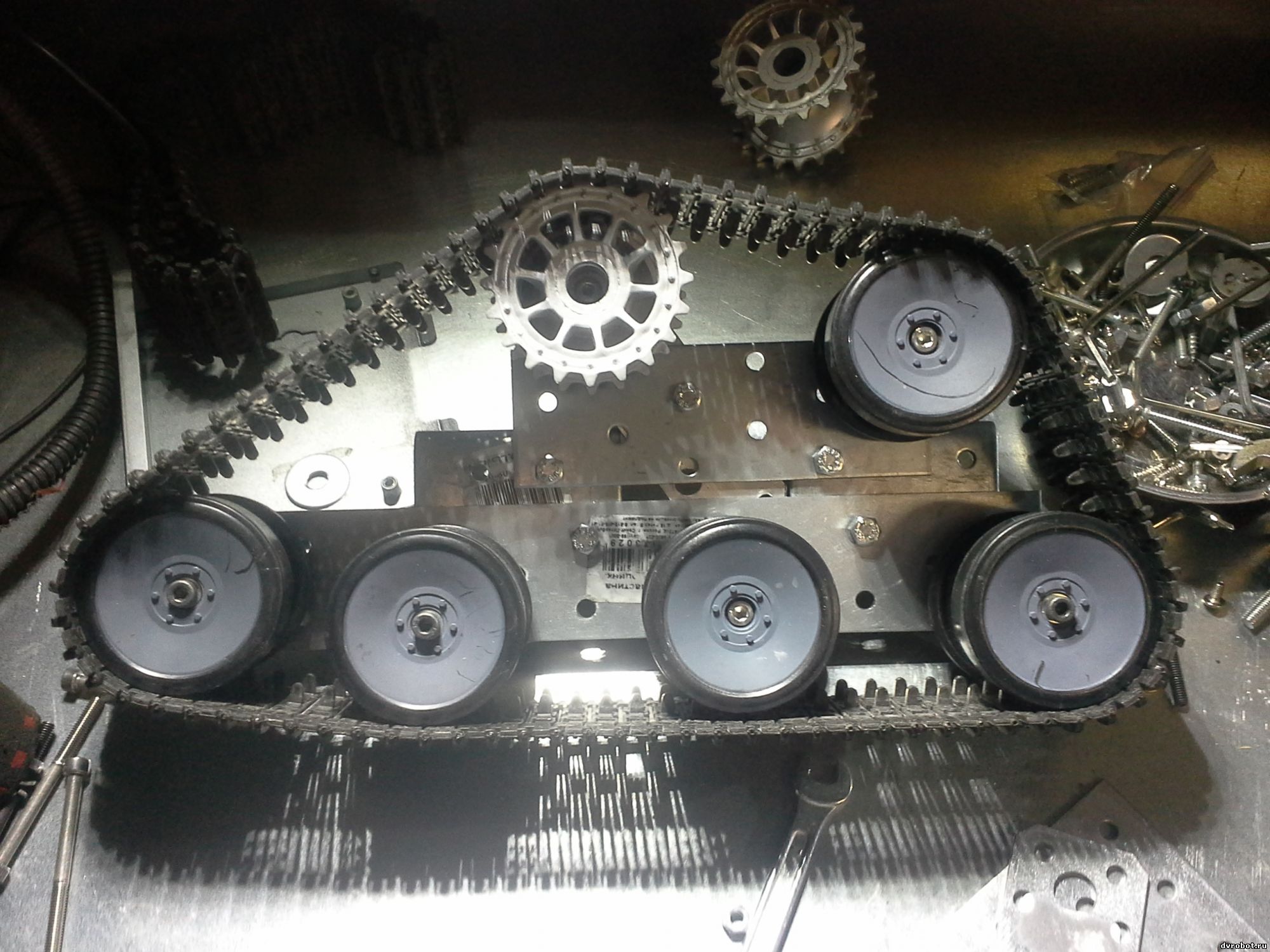
Пришел рем.комплект гусениц и катков,любезно предоставленный магазином DV-Robot и лично хочу сказать спасибо Максиму Грач.
Что сделано на этот раз
1)Была переделана кинематика,что бы исключить задевание препятствий выступающими частями рамы
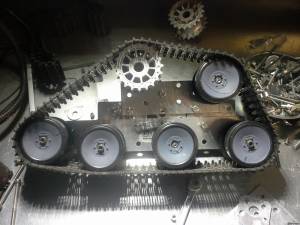
2) штатные винты крепления катков были заменены на более длинные из нержавейки- за счет чуть большей длины каток сидит ровно в том месте ,где нет резьбы - исключается самозатягивание гайкой и торможение гусеницы.

3)планки корпуса и остальные части были зачищены- загрунтованы и окрашены.



4) программа была дописана для работы с беспроводным джойстиком Defender Scorpion RS3,имеющим в своем составе аналоговые стики , G-сенсор ну и интересный дизайн с удобным расположением в руке.

5)для рабочего освещения был взят светодиодный фонарик с 2 типами линз-ближний-дальний.

6) Печатная плата переделывается и компонуется все более и более мелкими модулями-платами-датчиками для упрощения сборки и более высокой ремонтопригодности.
7) добавлен ИК датчик расстояния в место ультра-звукового, т.к УЗ имеет большую задержку по таймингам опроса, и иногда это вызывало торможение в обработки команд с джойстика.
Сейчас все собирается в кучу, шлифуется код программы и тестируется для участия в РОБОМЕХе-2014 .
Сообщение отредактировал Trooper_OK - Суббота, 29.11.2014, 23:49 |
| |
| |
| Trooper_OK | Дата: Вторник, 02.12.2014, 11:41 | Сообщение # 16 |
|
5 Вольт
Группа: Пользователи
Сообщений: 52
Репутация: 20
Статус: Offline
| Добавлю немного фотографий рабочего процесса




|
| |
| |
| Trooper_OK | Дата: Суббота, 13.12.2014, 17:53 | Сообщение # 17 |
|
5 Вольт
Группа: Пользователи
Сообщений: 52
Репутация: 20
Статус: Offline
| Уф... вот и завершилась выставка Робомех 2014 , на котором была выставлена наша платформа в тест-драйвовом режиме )

Джойстик прошел через десятки детских и взрослых рук,платфома пережила падение с высоты 1 метра и продолжила работать как ни в чем не бывало... Так что проект показал себя работоспособным и живучим.

И его считаю полностью законченным.
Файлы с программой,скетчем и печатной платой будут выложены чуть позже.
|
| |
| |
| lori | Дата: Воскресенье, 14.12.2014, 20:37 | Сообщение # 18 |
 12 Вольт
Группа: Пользователи
Сообщений: 108
Репутация: 20
Статус: Offline
| Платформа шикарная, сам ее юзал. Просто класс!!!!
|
| |
| |
| Trooper_OK | Дата: Воскресенье, 25.01.2015, 19:52 | Сообщение # 19 |
|
5 Вольт
Группа: Пользователи
Сообщений: 52
Репутация: 20
Статус: Offline
| ссылка на файлы и программы Доступно только для пользователей
Сообщение отредактировал Trooper_OK - Воскресенье, 25.01.2015, 19:52 |
| |
| |
| akatla | Дата: Пятница, 20.02.2015, 23:54 | Сообщение # 20 |
 1.5 Вольт
Группа: Пользователи
Сообщений: 6
Репутация: 0
Статус: Offline
| Цитата Trooper_OK (  ) https://cloud.mail.ru/public/ae48bda46641/%D0%94%D0%92%20%D0%A0%D0%BE%D0%B1%D0%BE%D1%82
Akatla
|
| |
| |
| Jc_Werder | Дата: Среда, 10.08.2016, 03:38 | Сообщение # 21 |
 1.5 Вольт
Группа: Пользователи
Сообщений: 4
Репутация: 0
Статус: Offline
| круто!
AA
|
| |
| |
| Trooper_OK | Дата: Понедельник, 14.11.2016, 22:27 | Сообщение # 22 |
|
5 Вольт
Группа: Пользователи
Сообщений: 52
Репутация: 20
Статус: Offline
| К готовящемуся форуму Робомех-2016 решил обновить свою железку.
Что будет заменено - радиоуправление(виртуальный ком-порт- та еще проблема),двигатели-редукторы(один сдох),гусеницы(за 2 года размягчились и стали хрупкие),АКБ (время подточило емкость).
Пока все необходимое заказано - скоро буду фотографировать что вышло..
Сообщение отредактировал Trooper_OK - Понедельник, 14.11.2016, 22:28 |
| |
| |
| Trooper_OK | Дата: Суббота, 19.11.2016, 01:17 | Сообщение # 23 |
|
5 Вольт
Группа: Пользователи
Сообщений: 52
Репутация: 20
Статус: Offline
| В общем был куплен пульт (отдельный от компа) - такой http://dvrobot.ru/240/251/1286.html ,приемник в комплекте,инструкция на полном китайском)
Для спаривания приемника и передатчика необходимо использовать входящую к приемнику перемычку.Подав питание на приемник (5 вольт=
низ -,центр +)и поставив перемычку в разъем ID -включил передатчик- мигания зеленой лампочки прекратились - значит теперь они "одной крови".
С приемника выходят 6 выводов с PPM модуляцией- для серводвигателей это хорошо, для коллекторников бесполезно....
Значит нужен преобразователь сигналов.Что бы не изобретать велосипед с написанием своей прошивки - было перелопачено кучу форумов и залиты десятки скетчей в качестве подопытных- пока не остановился на самом простом и действенном (хоть и нерусском варианте)
значения в верхнем поле поправлены с учетом каллибровки пульта- в крайних положениях он не выдает 100%,а где то от 20 до 80%.....
на сейте http://www.instructables.com/id/Rc-Controller-for-Better-Control-Over-Arduino-Proj/step2/Difference-between-ppm-and-pwm/#step1 в 6 шагов расписано все что требуется.
Добавить решел хваталку http://dvrobot.ru/240/279/106.html но малость доработанную- не нравится мне нконструкция,невозможно использовать весь диапазон сервы упирается в крепежки.
Двигатели поменял на http://dvrobot.ru/240/286/287/63.html , у них вал 4 мм а не 5..значит придется докупать переходники для звездочек.
АКБ решил использовать такой http://dvrobot.ru/241/278/988.html ,стартовые токи пока тянет,да и вес меньше чем у свинца.
Вторая ардуинка будет для телеметрии - для нее делается макетка с разводкой всех датчиков и индикаторов.
На данный момент имею бодро бегающую платформу и кучку проводов в перемешку с платами в пакетике на крыше)
продолжение скоро...
|
| |
| |
| Trooper_OK | Дата: Вторник, 22.11.2016, 12:30 | Сообщение # 24 |
|
5 Вольт
Группа: Пользователи
Сообщений: 52
Репутация: 20
Статус: Offline
| тема переехала на новый форум сюда http://dvrobot.ru/forum/topic/44/
|
| |
| |