|
Робот-платформа
|
|
| lori | Дата: Среда, 26.03.2014, 11:17 | Сообщение # 61 |
 12 Вольт
Группа: Пользователи
Сообщений: 108
Репутация: 20
Статус: Offline
| Маленькая фото сессия лаборатории робототехники:
Общий вид рабочих мест, видны роботы.

Фотографии слесарки
Рабочий верстак

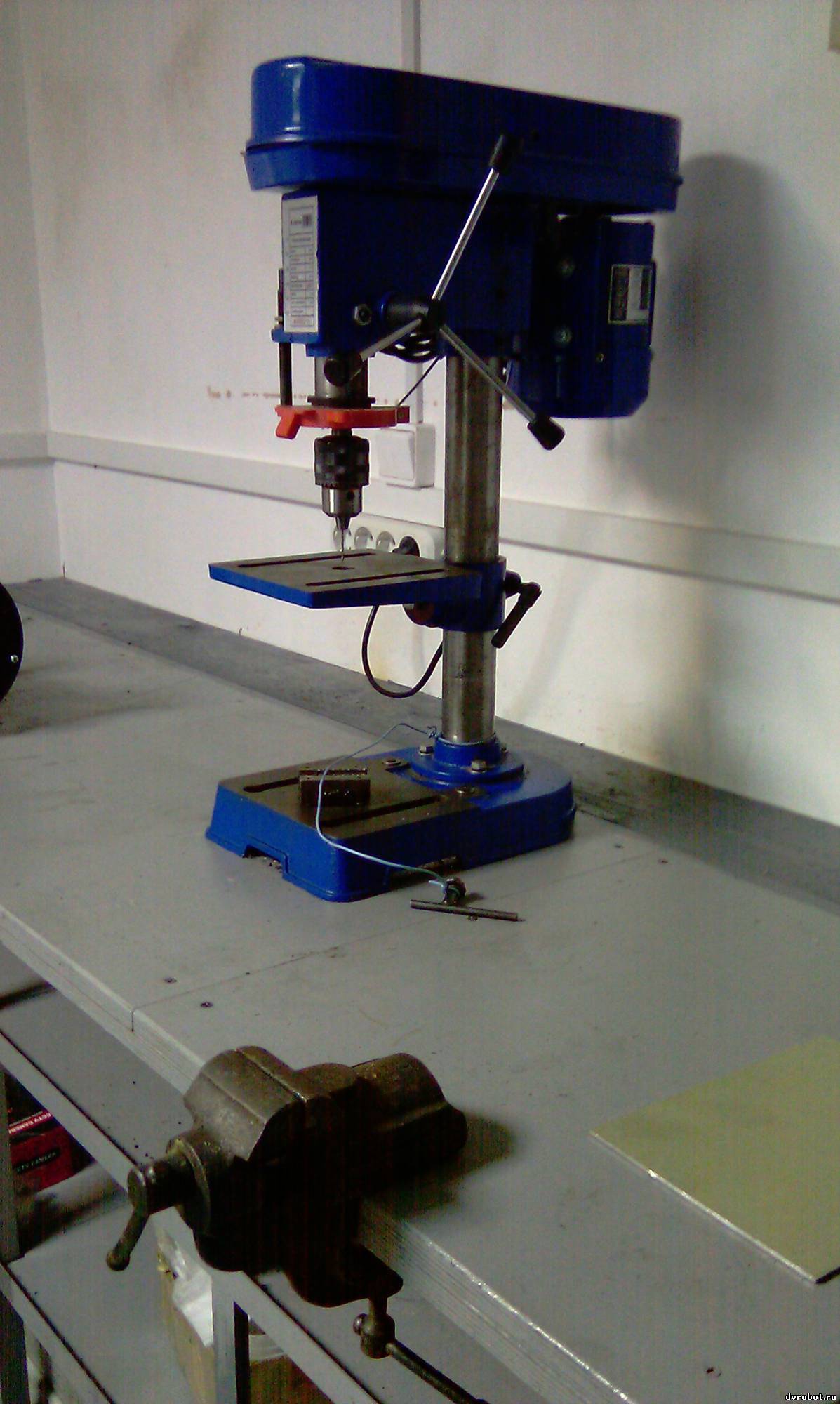
Станки

Токарный станок

Сверлильный станок

Точильный станок

Планируется еще приобретение муфельной печи, фрезерного станка, 3D-принтера, документ камеры и т.д.
Добавлено (26.03.2014, 11:17)
---------------------------------------------
Есть немного новостей.
Начали работу над манипуляторами робота. Есть несколько вариантов приводов.
Первый:
Стандартная схема - обычно манипуляторы строят с использованием серводвигателей. К достоинствам относится относительная простота конструкции, множество готовых манипуляторов и "полуфабрикатов". К недостаткам можно отнести не точное позиционирование, увеличение веса руки за счет того что двигатели расположены на самой руке, ненадежность конструкции серводвигателей.
Второй:
Перемещение с помощью тросиков - двигатели установлены в теле робота, сгибание суставов происходит посредством натяжных тросиков. Достоинства - высокая точность позиционирования, манипулятор получается легким и при этом может развивать большие усилия. Недостаток - сложность кинематики, ненадежность серводвигаталей.
Третий:
Использование актуаторов - штоковые актуаторы позволяют сгибать и разгибать конечности, актуаторы вращения поворачивать конечности вокруг своей оси. Достоинства - высокая точность позиционирования, возможность изменять в широком диапазоне скорость перемещения конечностей. Недостатки - увеличенный вес конструкции манипулятора, высокая стоимость актуаторов.
Вариант на сервах отпал сразу, по причине не точного позиционирования. Будем пробовать второй и третий варианты.
Еще, начали понемногу изучать ROS, пока идет туго, но надеемся на лучшее.
Продолжаются работы над SLAM, тоже туговато.
Продолжаем работу над модулем распознавания лиц людей.
Сообщение отредактировал lori - Четверг, 03.04.2014, 06:55 |
| |
| |
| Serg | Дата: Среда, 26.03.2014, 14:28 | Сообщение # 62 |
|
Ампер
Группа: Модераторы
Сообщений: 510
Репутация: 28
Статус: Offline
| 
|
| |
| |
| lori | Дата: Понедельник, 31.03.2014, 22:31 | Сообщение # 63 |
|
12 Вольт
Группа: Пользователи
Сообщений: 108
Репутация: 20
Статус: Offline
| Кстати, народ, если кто желает подключить сенсор KINECT к компьютеру, милости прошу в мою тему на roboforum.ru.
Вот ссылка:
http://roboforum.ru/forum68/topic13936.html
Сообщение отредактировал lori - Понедельник, 31.03.2014, 22:32 |
| |
| |
| lori | Дата: Понедельник, 19.05.2014, 23:25 | Сообщение # 64 |
|
12 Вольт
Группа: Пользователи
Сообщений: 108
Репутация: 20
Статус: Offline
| Доброго времени суток, уважаемые роботостроители!
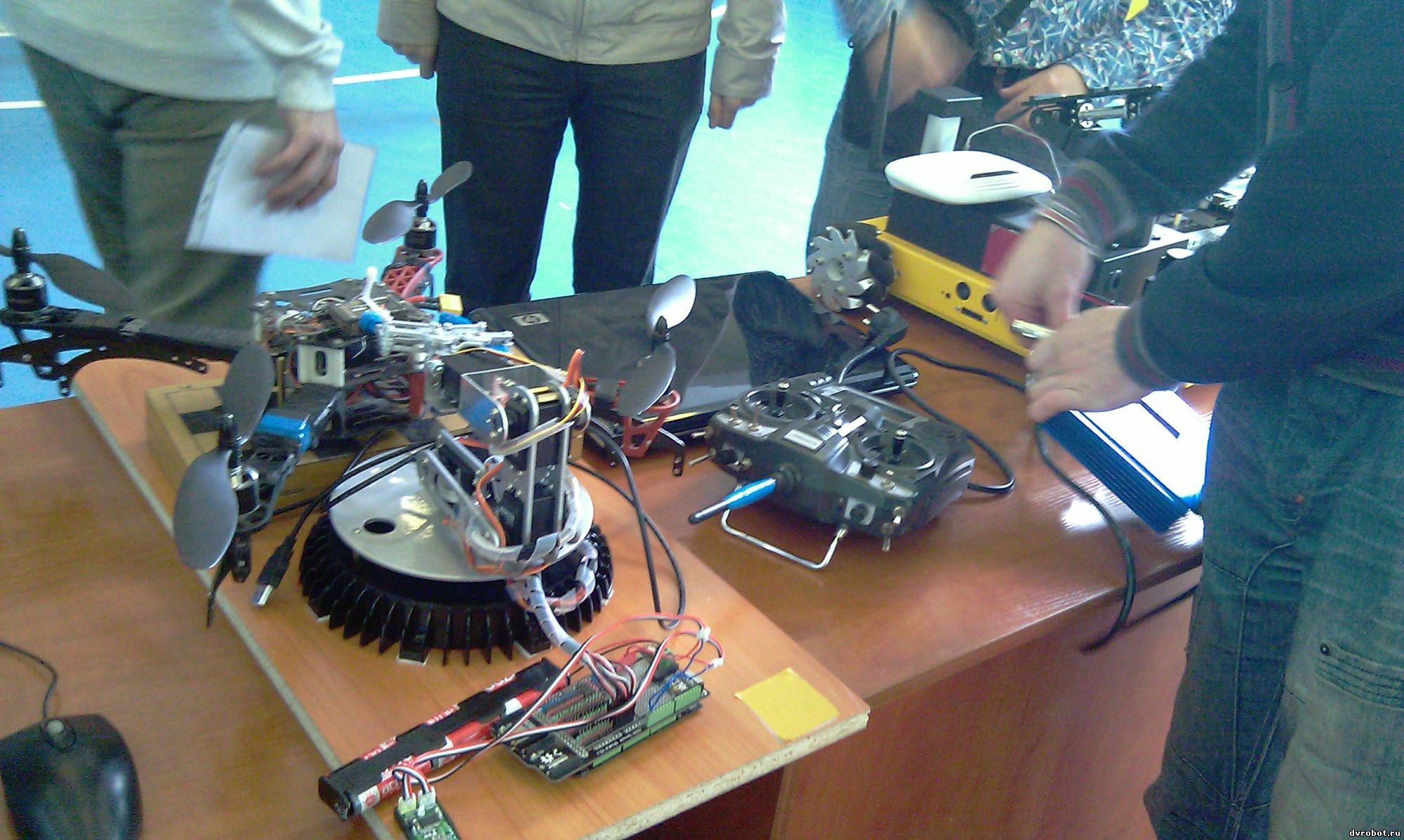
Хочу поделиться радостью, в субботу 17 мая с.г. на базе Комсомольского-на-Амуре политехнического университета прошел фестиваль технического творчества "Техно-Фест 2014", инженерно-технические кадры инновационной России.


Мероприятие краевого масштаба. Выставили свои работы учащиеся Хабаровского края - школьники, студенты СУЗ-ов и ВУЗ-ов. Были проведены турниры по направлениям: робототехника, судомоделирование, автомоделирование, показательные выступления авиамоделистов. Для автомоделей была построена специальная трасса с препятствиями. Модели кораблей и подводных лодок соревновались в лабораторном бассейне кораблестроительного факультета. Были представлены новые технологии, такие как 3D сканирование, компьютерное распознавание образов (детектирование человека), искусственный интеллект.
В целом мероприятие прошло на ОТЛИЧНО!!!
Ниже несколько фотографий.
Наша компания была приглашена на мероприятие в качестве спонсоров, а так же мы представили свои разработки и параллельное подразделение IRobot по продажам роботов пылесосов.
Наш стенд:



Ваши покорные слуги:
Изделия представленные на выставке:



Компьютеризированный резак по пенопласту, очень точено и тонко вырезает различные фигурки:

Сообщение отредактировал lori - Среда, 21.05.2014, 08:46 |
| |
| |
|
| lori | Дата: Суббота, 21.06.2014, 08:12 | Сообщение # 66 |
|
12 Вольт
Группа: Пользователи
Сообщений: 108
Репутация: 20
Статус: Offline
| В нашем проекте предполагается использовать систему распознавания лица человека. Алгоритм работает так, что при детектировании фигуры человека сенсором KINECT робот пытается детектировать лицо (так же сенсором), при детектировании лица производится попытка распознания человека стоящего перед роботом, и если в базе имеется лицо детектированного человека, то робот узнает его и обращается к нему по имени. Для решения задачи распознавания лица мы пробовали пользоваться средствами OpenCV, но, к сожалению, качество узнавания лица человека очень низкое. Робот не верно распознает лицо человека, постоянно путает лица, более того, не известных ему людей пытается сопоставить (и весьма успешно к сожалению) с лицами из базы, таким образом создается полное впечатление, что алгоритм работает просто ужасно.
В итоге, была предпринята попытка найти более надежное решение для распознавания лица. После некоторых поисков наткнулись на алгоритм TLD (http://www.gnebehay.com/tld/), алгоритм так же работает на основе библиотеки OpenCV, но использует другие методы. Тест показал достаточно стабильное детектирование объектов, и хотя сам алгоритм предназначен не для распознавания, а для трекинга объектов, думаем, что после некоторой доработки он успешно сможет распознавать лица. Во всяком случае качество трекинга у него много надежнее.
|
| |
| |
| lori | Дата: Суббота, 21.06.2014, 08:15 | Сообщение # 67 |
|
12 Вольт
Группа: Пользователи
Сообщений: 108
Репутация: 20
Статус: Offline
| 
Сообщение отредактировал lori - Суббота, 21.06.2014, 08:19 |
| |
| |
| lori | Дата: Суббота, 21.06.2014, 08:16 | Сообщение # 68 |
|
12 Вольт
Группа: Пользователи
Сообщений: 108
Репутация: 20
Статус: Offline
| После долгого перерыва продолжил заниматься одометрией. В итоге, это оказалось не такой уж сложной задачей как казалось сначала. Решение всех вопросов по одометрии сводится к решению тригонометрических функций уровня 9-го класса общеобразовательной школы.
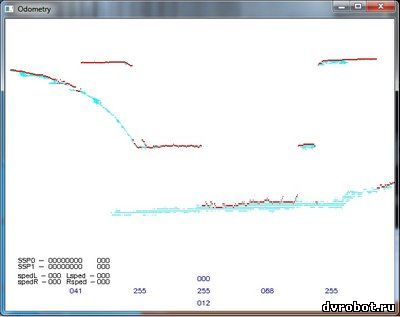
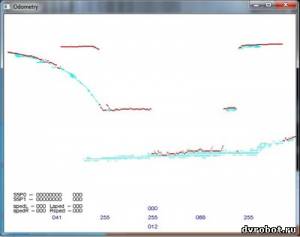
Ниже визуализированный пример работы обометрии:
Это кадр из видео ряда возвращаемого сенсором KINECT. На кадре видны две коробки установленные для детектирования сенсором, на дальнем плане стоит кружка, по левой стороне кадра проходят перилы.

На этом кадре возвращаемым сенсором глубины красным обозначаются самые ближние к сенсору точки препятствий

Здесь эти точки сведены в плоскость, таким образом мы имеем, если можно так сказать, плоскую карту наиболее близких предметов с карты глубины сцены.
Сообщение отредактировал lori - Суббота, 21.06.2014, 08:17 |
| |
| |
| lori | Дата: Суббота, 21.06.2014, 08:18 | Сообщение # 69 |
|
12 Вольт
Группа: Пользователи
Сообщений: 108
Репутация: 20
Статус: Offline
| Как всегда мы не стоим на месте, на днях пришел 3D принтер, начали осваивать, теперь детали сможем изготавливать быстрее и качественнее. Сразу попытались распечатать тестовую фигурку... - как всегда, первый блин комом! попытались еще раз... - второй тоже комом, БЛИН!!! В общем, не так это просто - 3D печать, ну, ничего, не такое еще побеждали.
Еще новость: Серво-двигатели головы робота и конструируемых сейчас рук-манипуляторов управляются через Arduino. Не удовлетворительные показатели и ограниченность библиотеки Arduino заставляют нас перейти на управление сервами другим контроллером. После долгих сомнений и колебаний решили, для управления сервами, использовать Polulu Maestro (фото прилагается):

Причина замены в более универсальном управлении сервами у Maestro по сравнению с Arduino, более точное позиционирование вала двигателя, возможность изменять скорость поворота. А главное теперь сервы отвязаны от Arduino, т.е. мы не ограничены количеством портов контроллера, Maestro можно добавлять сколько душе угодно. К недостатком можно отнести задействование еще одного USB порта у компьютера.
Сообщение отредактировал lori - Суббота, 21.06.2014, 08:18 |
| |
| |
| lori | Дата: Вторник, 01.07.2014, 20:46 | Сообщение # 70 |
|
12 Вольт
Группа: Пользователи
Сообщений: 108
Репутация: 20
Статус: Offline
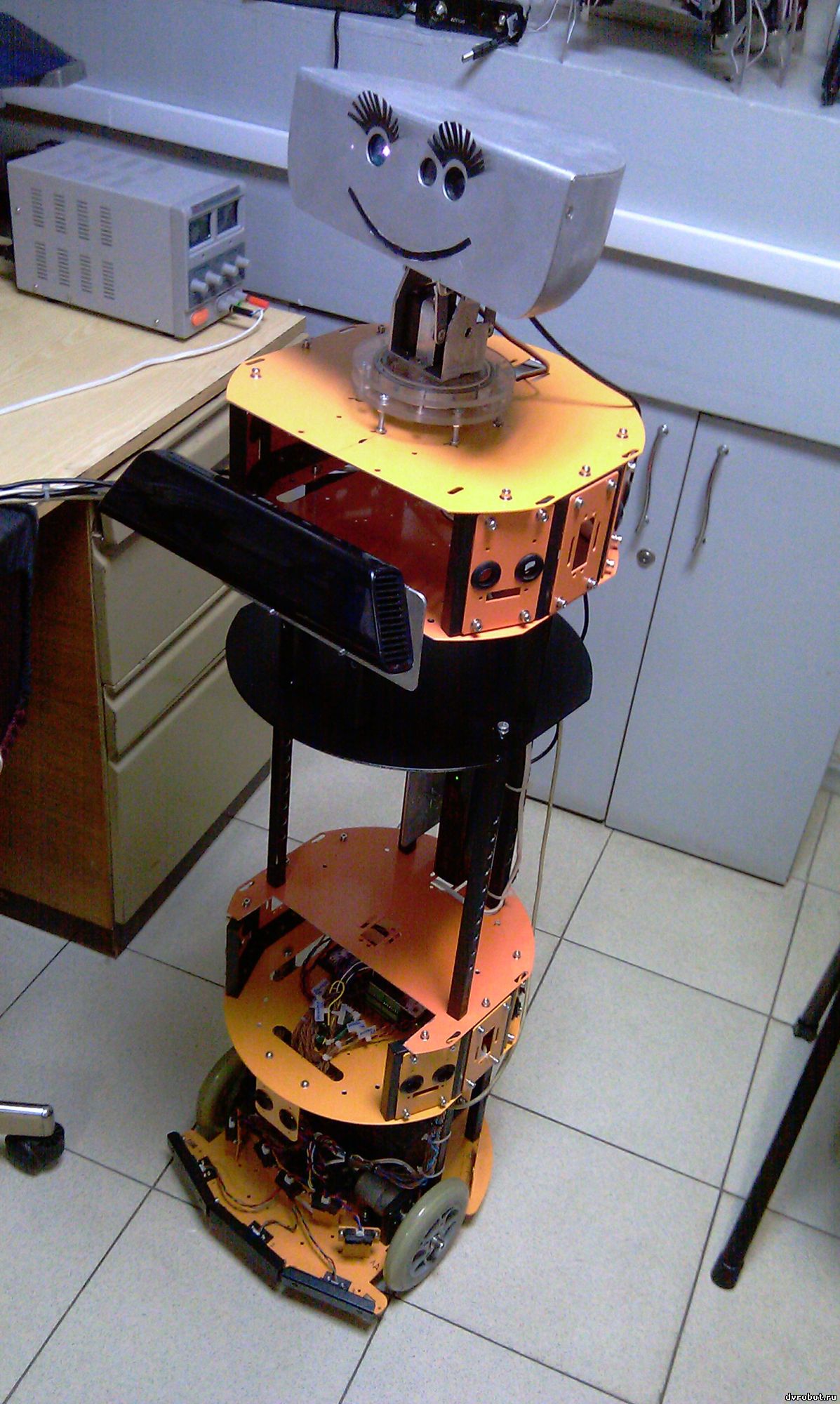
| В продолжении развития проекта работаем над одометрией, и задумались над тем, как уменьшить слепую зону впереди робота создаваемую сенсором KINECT. Я имею в виду то, что, как известно, сенсор начинает "видеть" объекты с расстояния от 80 см и до 3,5 метров. Дальность три с половиной метра в условиях помещения вполне достаточно для робота, а вот 80 см слепой зоны спереди это очень много! Одним из первоначальных решений было установить сенсор как можно ближе к задней части робота, это сократило слепую зону на 20 см., но и этого в реальности не достаточно. И вот одному из нас в голову приходит идея развернуть сенсор вертикально. Как известно угол обзора сенсора составляет по горизонтали - 57 градусов, по вертикали - 43 градуса, т.е. теоретически развернув сенсор можно получить больший угол обзора. Мы провели эксперимент. Поставили рябом с роботом на подставке еще одни сенсор, но развернули его на 90 градусов:

Результаты эксперимента обнадежили. Действительно в таком положении сенсор захватывал по вертикали большую зону, правда, естественно, обзор сузился по горизонтали, но это особо не является проблемой, т.к. такого угла зрения, по горизонтали, вполне достаточно для одометрии. Таким образом, у нас появилась надежда расширить угол обзора по вертикали и еще немного сократить слепую зону впереди робота.
Но возникла новая трудность - картинка возвращаемая сенсором тоже повернулась на 90 градусов. Нет проблем с видео, средствами OpenCV все это быстро приводится в порядок, а вот с картой глубины, которая как раз и используется в одометрии все намного сложнее. Пришлось написать алгоритм пересчета данных из линейного потока в структуру cvMat. Сложность была в том, что строки должны были стать столбцами, а столбцы напротив строками, и эту информацию (о строках и столбцах) нужно было извлечь из прямолинейного потока кадра, который изначально не представляет из себя ничего общего с видео кадром. Кроме того нужно было сохранить самое главное - данные о глубине сцены. В общем, после некоторых мучений, наконец добились положительного результата. Теперь угол зрения по горизонтали стал больше, а главное еще почти на 10 см. сократилась слепая зона и теперь составляет чуть больше 50-ти см. Конечно и это еще большое значение, но здесь помогают инфракрасные датчики и механический бампер установленные в передней части робота.
Для установки сенсора в тело робота пришлось немного видоизменить конструкцию туловища. Теперь робот с вертикальным KINECT-ом выглядит вот так:

А вот первые результаты печати на 3D принтере. Нарисовали и распечатали прототипы шестеренок для рук-манипуляторов робота:

Сообщение отредактировал lori - Вторник, 01.07.2014, 20:49 |
| |
| |
| lori | Дата: Понедельник, 18.08.2014, 23:17 | Сообщение # 71 |
|
12 Вольт
Группа: Пользователи
Сообщений: 108
Репутация: 20
Статус: Offline
| Всем привет! 
Все это время не стояли на месте. Вот новости вкратце:
1. установили на робота еще один KINECT!!! 
2. робот подрос еще на 10 см.
3. очень медленно, но продвигаются дела с манипуляторами
Теперь подробнее.
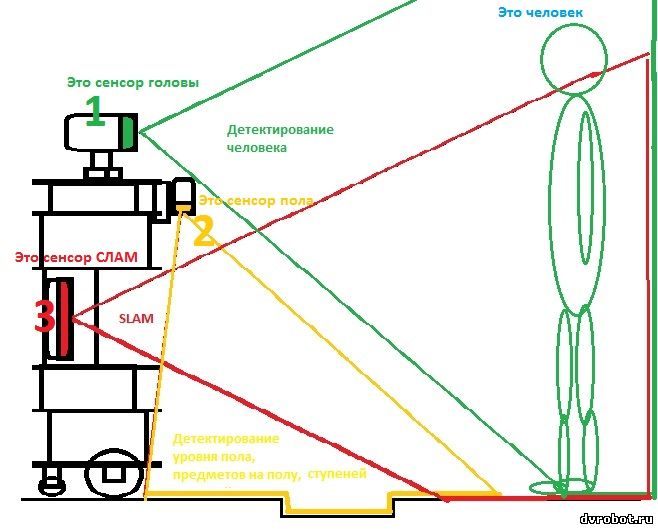
1. Эксперименты с навигацией показали, как и предполагалось, не удовлетворительность результатов при работе сенсора KINECT на близких расстояниях. Проблема в слепой зоне сенсора, как уже писалось он начинает "видеть" глубину сцены с 80 см., перемещение сенсора в заднюю часть робота и разворот сенсора на 90 градусов дало уменьшение слепой зоны на 20 см. Стало лучше. Но, для перемещения в помещении, полученные 60 см. слепоты является очень критичным расстоянием. В узкий проход робот не может пролезть по причине того, что не видит препятствий. Было очень грустно смотреть  как LUM тыкается, как слепой котенок, о дверной косяк или угол шкафа, благо IR сенсоры спереди срабатывали и не давали роботу столкнуться с препятствием и окончательно разбить наши надежды и самого робота. Решение пришло, как обычно, нежданно. В очередной из таких печальных столкновений, голова робота от резкой остановки опустилась вперед вниз (привод шеи был отключен и башка болталась просто так, сама по себе). И на мониторе ПК мы увидели замечательную картинку с сенсора головы LUM-а. Как на ладони виден был пол, со всеми предметами лежащими на нем. Таким образом было принято совершенно дикое и безумное решение установить ТРЕТИЙ!!! KINECT на робота. За то теперь мы имеем следующие возможности - сенсор в голове следит за человеком, а так же предполагается что частично будет задействован в навигации. Сенсор установленный в теле робота отвечает собственно за навигацию и SLAM. Третий сенсор работает как детектор возможных препятствий на полу, так же он детектирует перепады высот (ступени вниз или вверх). Главное что сенсор видит буквально от переднего бампера робота и до 80 см. вперед. Таким образом, мы перекрыли слепую зону спереди LUM-а, можем определять и объезжать как предметы лежащие на полу (причем любого размера), так и детектировать лестницу вниз (т.е. робот не упадет со ступенек). как LUM тыкается, как слепой котенок, о дверной косяк или угол шкафа, благо IR сенсоры спереди срабатывали и не давали роботу столкнуться с препятствием и окончательно разбить наши надежды и самого робота. Решение пришло, как обычно, нежданно. В очередной из таких печальных столкновений, голова робота от резкой остановки опустилась вперед вниз (привод шеи был отключен и башка болталась просто так, сама по себе). И на мониторе ПК мы увидели замечательную картинку с сенсора головы LUM-а. Как на ладони виден был пол, со всеми предметами лежащими на нем. Таким образом было принято совершенно дикое и безумное решение установить ТРЕТИЙ!!! KINECT на робота. За то теперь мы имеем следующие возможности - сенсор в голове следит за человеком, а так же предполагается что частично будет задействован в навигации. Сенсор установленный в теле робота отвечает собственно за навигацию и SLAM. Третий сенсор работает как детектор возможных препятствий на полу, так же он детектирует перепады высот (ступени вниз или вверх). Главное что сенсор видит буквально от переднего бампера робота и до 80 см. вперед. Таким образом, мы перекрыли слепую зону спереди LUM-а, можем определять и объезжать как предметы лежащие на полу (причем любого размера), так и детектировать лестницу вниз (т.е. робот не упадет со ступенек).
2. В следствии этой модернизации пришлось поднять высоту робота еще на 10 см. для более устойчивого детектирования пола и предметов на нем. Теперь "рост ребенка" составляет 116 см.
3. Почти готов плечевой сустав манипулятора.
Сообщение отредактировал lori - Суббота, 23.08.2014, 10:16 |
| |
| |
| lori | Дата: Суббота, 23.08.2014, 11:01 | Сообщение # 72 |
|
12 Вольт
Группа: Пользователи
Сообщений: 108
Репутация: 20
Статус: Offline
| Выкладываю последние фото LUM-а. Как видно в робота встроено три кинекта и LUM уже самостоятельно и весьма успешно передвигается по помещению с их помощью.
 
Но остается одна не решенная задача. LUM пока катается на "поводке", в том смысле что он привязан к настольному компьютеру проводами. Проблема как раз в том, что в робота встроено три сенсора KINECT, а каждый из них для подключения к компьютеру требует собственного USB контроллера. Попытка найти ноутбук с тремя USB контроллерами не увенчалась успехом, как правило в ноутбуках стоит один такой контроллер и USB концентратор для расширения входов. Попытались найти безпроводной радио-USB-удлинитель. Купили "белкина", но мало того что это устройство стоит порядка 13000 руб., так еще и работает только под XP, а KINECT под XP как раз не работает (нет поддержки). Еще одно решение установить в робота системную плату от настольного ПК, но здесь свои проблемы. Системная плата требует несколько напряжений для своего питания, да и энергопотребление у нее не маленькое, а у нас на борту только аккумулятор 12В. Нашли преобразователь DC-DC для питания компьютера от 12В., этот преобразователь выдает все нужные напряжения. Заказали, сейчас где то в пути с eBay-я, как придет будем пробовать. Но, как мне видится, это не самое лучшее решение проблемы. Хотелось бы чтобы все вычислительные мощности были вынесены с робота на отдельный компьютер, а связь между ними была безпроводная. Может кто посоветует какие идеи по этому поводу? А может и готовые решения имеются. Еще раз опишу проблему:
необходимо по безпроводному каналу подключить три (и более) высокоскоростных устройства к компьютеру, при этом каждое устройство требует своего USB контроллера.
А может кто подскажет модель ноутбука с тремя USB контроллерами?
Сообщение отредактировал lori - Суббота, 23.08.2014, 11:02 |
| |
| |
| muvey | Дата: Суббота, 23.08.2014, 14:50 | Сообщение # 73 |
 220 Вольт
Группа: Пользователи
Сообщений: 305
Репутация: 1
Статус: Offline
| lori, а если нагрузить робота кислотным (гелевым) аккумом на 12 вольт,который можно разместить на самом нижнем уровне,а остальные напряжения (5в,3.3в) получить от стабилизаторов?Тогда и материнку ПК можно подключить...тем более,что мощный процессор не требуется и видеокарту не кормить..Ну,на худой конец,есть бесперебойник,у которого есть выход 220в,если уж так сетевое напряжение необходимо будет.
Ex nihilo nihil fit
Сообщение отредактировал muvey - Суббота, 23.08.2014, 14:54 |
| |
| |
| lori | Дата: Воскресенье, 24.08.2014, 09:02 | Сообщение # 74 |
|
12 Вольт
Группа: Пользователи
Сообщений: 108
Репутация: 20
Статус: Offline
| Благодарю за советы. По всей вероятности придется идти по пути установки на робота системной платы компьютера.
|
| |
| |
| muvey | Дата: Воскресенье, 24.08.2014, 09:12 | Сообщение # 75 |
|
220 Вольт
Группа: Пользователи
Сообщений: 305
Репутация: 1
Статус: Offline
| lori, да и жесткий диск заменить на твердотельный,а CD-привод тоже не нужен...существенная экономия энергии..:)
...а как дела с манипулятором?
Ex nihilo nihil fit
|
| |
| |
| lori | Дата: Воскресенье, 24.08.2014, 12:10 | Сообщение # 76 |
|
12 Вольт
Группа: Пользователи
Сообщений: 108
Репутация: 20
Статус: Offline
| Конечно SSD диск будем ставить, все остальные "обвесы" не нужны, в том числе и мощное видео-карта, и CD привод.
Манипуляторы в процессе, да уж очень медленно все идет. На половину готов только один плечевой сустав.
Сообщение отредактировал lori - Воскресенье, 24.08.2014, 12:14 |
| |
| |
| lori | Дата: Среда, 27.08.2014, 22:42 | Сообщение # 77 |
|
12 Вольт
Группа: Пользователи
Сообщений: 108
Репутация: 20
Статус: Offline
| Вот так работают сенсоры в роботе, каждый сенсор отвечает за свою область сканирования

|
| |
| |
| lori | Дата: Четверг, 04.09.2014, 09:55 | Сообщение # 78 |
|
12 Вольт
Группа: Пользователи
Сообщений: 108
Репутация: 20
Статус: Offline
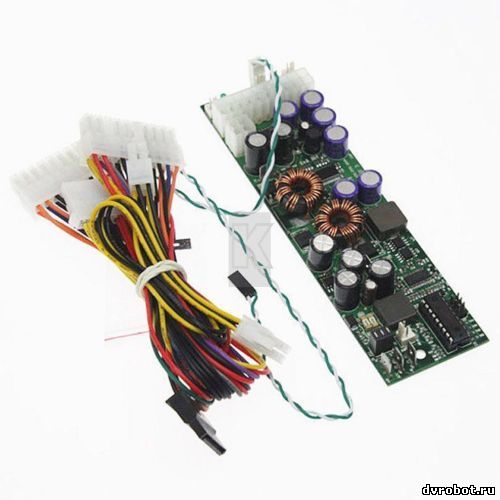
| Наконец пришел DC-DC преобразователь (8-28V 200W DC-DC PSU ITX ATX DIP Car PC Power Supply Module) для питания системной платы компьютера, преобразователь и плата PC будут встроены в LUM-а, таким образом робот приобретет полную автономность. Вот этот преобразователь

На радостях по этому поводу, подобрали и заказали остальное железо для мозгов LUM-а:
1. Процессор Intel Core i5-4430 3.0GHz (TB up to 3.2GHz) 6Mb 2xDDR3-1600 HDGraphics4600 TDP-84w LGA1150 OEM
2. Плата Gigabyte LGA1150 GA-Q87M-D2H Q87 4xDDR3-1600 2xPCI-Ex16 HDMI/DVI/DSub/DP 8ch 6xSATA3 2xUSB3 RAID GLAN mATX
3. Память DIMM DDR3 4096MBx2 PC12800 1600MHz Kingston HyperX CL9-9-9-27 [KHX1600C9D3K2/8G(X)] Retail
4. Твердотельный накопитель SSD 2.5" SATA-3 120Gb OCZ Vertex460 [VTX460-25SAT3-120G] Barefoot3 (R530/W420MB/s)
5. БП Chieftec 500W (80+ Bronze, ATX 2.3, APFC, 120mm fan, 24+4+4, 4xSATA, PCI-E) [BPS-500S/S2]
6. Кулер Arctic Cooling Freezer 11LP (Al, 900-2000 PWM, TDP-100w, 27 CFM, 23 dBA) for Socket-775//1150/1155/1156
7. Адаптер беспроводной TP-Link TL-WN751ND
8. Точка доступа TP-Link TL-WA701ND
9. Контроллер USB 3.0 NEC D720200F1 PCI-Ex1 - 2 шт.
По получении всего этого, начнем встраивать "железо" в робота, ставить и настраивать софт. Робот будет, предположительно, работать под управлением двух ОС (по выбору) Windows и Linux. Не смотря на то, что на сегодняшний день вся управляющая программа пишется на C++ под Windows, мы не оставляем надежды на постепенный переход на ROS, который, как известно, работает под Linux.
Кроме того приобрели два LED - 16 кольца (вот ссылка http://dvrobot.ru/238/809.html).

С их помощью немного оживим LUM-а. Это кольцо представляет из себя ряд RGB светодиодов расположенных по окружности, каждый светодиод снабжен своим контроллером, все контроллеры соединены последовательно, как бы в сеть, и у каждого контроллера свой ID. Иначе говоря мы имеем доступ к каждому светодиоду из всей гирлянды и любой из светодиодов можем зажечь любым цветом или погасить. Ценность девайса в том, что все команды управления диодами передаются по одной линии. Мы же хотим приладить эти штучки на камеры кинекта встроенного в голову робота и создать эффект моргания глазами, можно будет научить робота подмигивать одним глазом, менять цвет глаз в зависимости от настроения и состояния LUM-а, даже делать эффект глаз переливающихся радугой. Управляющий скетч уже написан, чуть позже попробую выложить видео. Честно говоря, идея таких глазок не нова, мы ее подсмотрели на примере робота Loki (http://www.dshinsel.com/loki/), уж очень понравились его живые глазки.
Пока все новости.
|
| |
| |
| lori | Дата: Вторник, 30.09.2014, 08:02 | Сообщение # 79 |
|
12 Вольт
Группа: Пользователи
Сообщений: 108
Репутация: 20
Статус: Offline
| Вот наконец и пришли все комплектующие для мозгов LUM-а.
Первый этап был - собрать все на столе и запустить работу программы управления роботом. Все прошло успешно. Железо без глюков состыковалось с софтом, встали ровно все дровишки,программа запустилась.
Следующий этап был перенос всего этого в робота. Определились с местом установки системной платы и диска. Установили. Вроде также все прошло гладко.
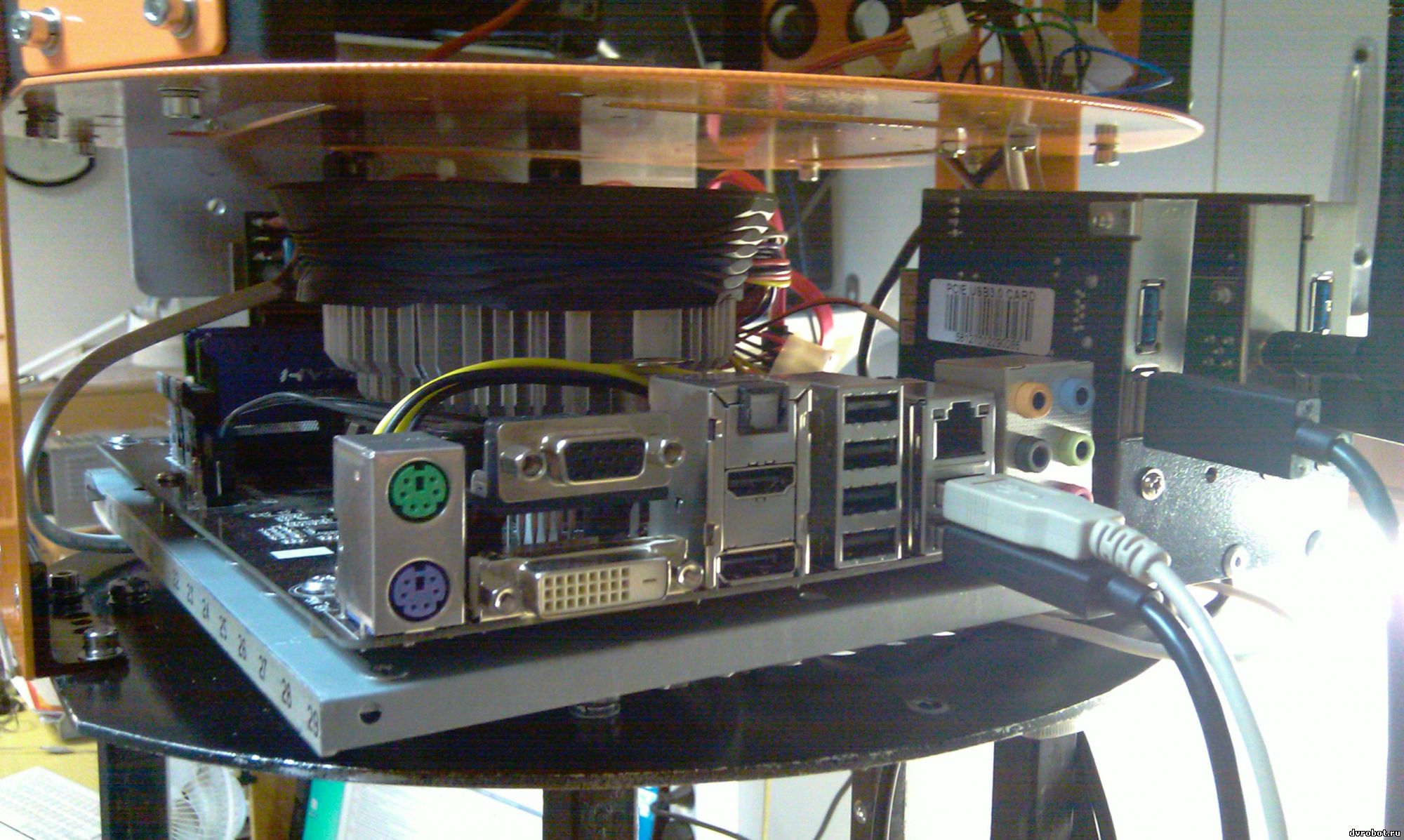
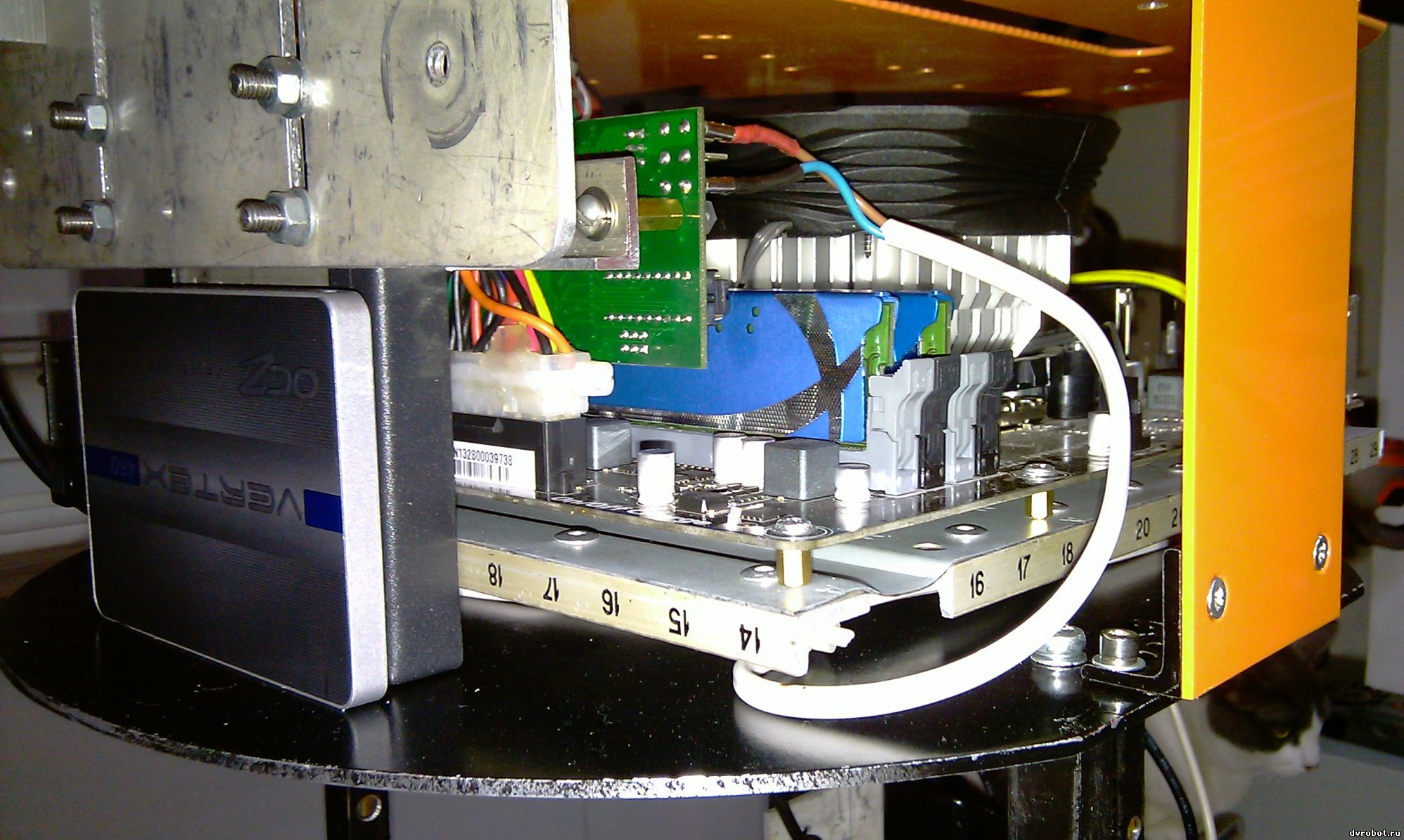
Вот что из всего этого вышло:
Плата установлена в робота, в верхней его части (вид сзади)

вид спереди

Общий вид робота

Ну и на закусочку наш робо-кот (точнее кошка) 

Итак, что мы сейчас имеем: Вся электроника перенесена в робота. LUM стал почти автономен. "Почти" это потому, что осталось решить задачу с питанием от аккумуляторов. А здесь есть несколько проблемс (может сообщество что то порекомендует?):
1. для питания системной платы нужен аккумулятор 24 Вольта, как минимум 35 А/ч, ну и габаритные характеристики важны, чем меньше тем лучше
2. для питания двигателей и прочей электроники нужен аккумулятор 12 Вольт и не меньше 20 А/ч
Объясню зачем два аккумулятора - коллекторные двигатели приводов колес робота очень "шумят" по линиям питания, именно по этом было принято решение разнести питания системной платы и приводов. 24-х вольтовый аккумулятор для питания платы нужен из соображений энерго-экономии. Токи потребляемые платой при пиковых нагрузках на 12 В достигают 7 А, при 24 В всего 3 А.
Вот таков расклад. Может кто посоветует где взять хорошие аккумуляторы?
Пока все.
|
| |
| |
| Trooper_OK | Дата: Вторник, 30.09.2014, 09:39 | Сообщение # 80 |
 5 Вольт
Группа: Пользователи
Сообщений: 52
Репутация: 20
Статус: Offline
| А в сторону гелевых АКБ от систем охраны не смотрели ? малые габариты- относительно не дорогие,удобрые клемы для подключения и емкость банки до 26А\ч

эта на 26 А ч

эта на 17 А ч
Сообщение отредактировал Trooper_OK - Вторник, 30.09.2014, 09:41 |
| |
| |
| lori | Дата: Вторник, 30.09.2014, 14:23 | Сообщение # 81 |
|
12 Вольт
Группа: Пользователи
Сообщений: 108
Репутация: 20
Статус: Offline
| Мысль хорошая, но есть опасения что они не могут отдавать большие пиковые токи, ведь в системах безопасности потребители все слаботочные, там главное чтобы в течении долгого времени АКБ работал. Тем не менее именно в эту сторону мы сейчас смотрим, в ближайшее время будем тестировать такие аккумуляторы.
|
| |
| |
| Trooper_OK | Дата: Вторник, 30.09.2014, 17:36 | Сообщение # 82 |
|
5 Вольт
Группа: Пользователи
Сообщений: 52
Репутация: 20
Статус: Offline
| У 26 амперного акб рабочий ток около 9 а, у 17 - 5...гелевые акб пусковые токи развивают достаточно большие- ведь в простых бесперебойниках на 220 стоят на 7Ач - и ток там при нагрузке в 500ВА большой..Единственно -они глубокого разряда боятся..
Сообщение отредактировал Trooper_OK - Вторник, 30.09.2014, 17:37 |
| |
| |
| GRACH | Дата: Среда, 01.10.2014, 18:05 | Сообщение # 83 |
 dvrobot.ru
Группа: Администраторы
Сообщений: 111
Репутация: 16181
Статус: Offline
| Если хотите можем подыскать вам батарею от электро-мопеда-велосипеда. Там как раз то, что вам нужно.
|
| |
| |
| lori | Дата: Среда, 01.10.2014, 18:15 | Сообщение # 84 |
|
12 Вольт
Группа: Пользователи
Сообщений: 108
Репутация: 20
Статус: Offline
| Цитата GRACH (  ) Если хотите можем подыскать вам батарею от электро-мопеда-велосипеда. Там как раз то, что вам нужно.Да,
Нужно два аккумулятора
1. 24 В., 35А/ч
2. 12 В., 20А/ч
Но прежде меня интересует цена и габариты аккумуляторов.
|
| |
| |
| Trooper_OK | Дата: Вторник, 07.10.2014, 02:07 | Сообщение # 85 |
|
5 Вольт
Группа: Пользователи
Сообщений: 52
Репутация: 20
Статус: Offline
| 26 А\Ч Размеры (ДхШхВ)- 165х175х125 мм, вес - 8,9 кг цена 1900 руб
17 А\Ч Размеры (ДхШхВ)- 181х76х167 мм, вес - 6,2 кг цен 1550 руб
|
| |
| |
| lori | Дата: Вторник, 07.10.2014, 06:42 | Сообщение # 86 |
|
12 Вольт
Группа: Пользователи
Сообщений: 108
Репутация: 20
Статус: Offline
| Цитата Trooper_OK ( ) 26 А\Ч Размеры (ДхШхВ)- 165х175х125 мм, вес - 8,9 кг цена 1900 руб 17 А\Ч Размеры (ДхШхВ)- 181х76х167 мм, вес - 6,2 кг цен 1550 руб
Сообщение отредактировал lori - Вторник, 07.10.2014, 18:07 |
| |
| |
| Trooper_OK | Дата: Вторник, 07.10.2014, 14:34 | Сообщение # 87 |
|
5 Вольт
Группа: Пользователи
Сообщений: 52
Репутация: 20
Статус: Offline
| Я насколько видел в Пекине китайские мопеды- там стоят связки из 2-3 таких АКБ... хотя может что то новое появилось
|
| |
| |
| lori | Дата: Среда, 08.10.2014, 11:16 | Сообщение # 88 |
|
12 Вольт
Группа: Пользователи
Сообщений: 108
Репутация: 20
Статус: Offline
| Наконец, после долгих трудов и стараний наш LUM обрел полную автономность. Ниже видео первых "полевых" испытаний:
Робот самостоятельно перемещается по помещению, обходя все препятствия и, самое главное, детектирует людей. При детектировании человека у робота глаза загораются зеленым cветом, и он, поворачивает голову вслед за перемещениями человека (это можно видеть на видео).
Но, есть и некоторые проблемы:
Полевые испытания показали малую устойчивость робота (он попросту раскачивается при смене траектории движения, это тоже можно заметить на видео), происходит это в следствии узости колесной базы. Пришлось расширить и удлинить базу робота (фото выложу позже), при этом возникла другая проблема - изменился радиус разворота платформы, теперь, при развороте, робот иногда цепляет задней частью за окружающие предметы (теперь думаем как исправить). Тем не мене, расширение колесной базы платформы дало свой положительный результат, после некоторой корректировки управляющей программы, удалось заставить робота перемещаться более уверенно. Но остались не разрешенные проблемы - робот не уверенно реагирует на нависающие поверхности - столешницы, стулья с отогнутыми спинками и т.п., он попросту их не всегда видит (что с эти делать, еще предстоит решить). Тем не менее думаю, что и эти возникшие проблемы мы в ближайшее время решим. Я бы сказал вот что: - Теперь начался КУРАЖ, нам не просто нужно, а "жизненно необходимо" довести проект, как говориться, до ума. Это классно!!! а для нас, просто - круто !!!
В целом, испытаниями робота в автономном режиме работы вполне удовлетворены. Будем продолжать работать дальше.
Сообщение отредактировал lori - Четверг, 09.10.2014, 20:12 |
| |
| |
| Trooper_OK | Дата: Среда, 08.10.2014, 22:33 | Сообщение # 89 |
|
5 Вольт
Группа: Пользователи
Сообщений: 52
Репутация: 20
Статус: Offline
| А клиенты купить не пытаются??
Кстати мне кажеться большой вес АКБ положительно сказывается на устойчивости, смещая центр тяжести к самому полу.
|
| |
| |
| lori | Дата: Четверг, 09.10.2014, 07:33 | Сообщение # 90 |
|
12 Вольт
Группа: Пользователи
Сообщений: 108
Репутация: 20
Статус: Offline
| Цитата lori ( ) А клиенты купить не пытаются??
Цитата lori ( ) Кстати мне кажеться большой вес АКБ положительно сказывается на устойчивости, смещая центр тяжести к самому полу. |
| |
| |