|
Робот-платформа
|
|
| vpuhoff | Дата: Четверг, 09.10.2014, 11:20 | Сообщение # 91 |
 1.5 Вольт
Группа: Пользователи
Сообщений: 2
Репутация: 0
Статус: Offline
| Цитата lori (  ) Робот самостоятельно перемещается по помещению, обходя все препятствия и, самое главное, детектирует людей. При детектировании человека у робота глаза загораются зеленым cветом, и он, поворачивает голову вслед за перемещениями человека (это можно видеть на видео). |
| |
| |
| GRACH | Дата: Вторник, 21.10.2014, 02:14 | Сообщение # 92 |
 dvrobot.ru
Группа: Администраторы
Сообщений: 111
Репутация: 16181
Статус: Offline
| lori, С АКБ возникли проблемы.
А именно с доставкой.
Очень сложно отправить, все компании боятся и отказываются.
Ищем пути.
|
| |
| |
| lori | Дата: Вторник, 21.10.2014, 06:57 | Сообщение # 93 |
 12 Вольт
Группа: Пользователи
Сообщений: 108
Репутация: 20
Статус: Offline
| GRACH, может сначала согласовать с нами параметры АКБ, а то получится что вы привезли, а нам не подойдут?
|
| |
| |
| GRACH | Дата: Четверг, 23.10.2014, 00:39 | Сообщение # 94 |
|
dvrobot.ru
Группа: Администраторы
Сообщений: 111
Репутация: 16181
Статус: Offline
| Доброе время.
Так вы же уже писали, что нужно
Цитата Нужно два аккумулятора
1. 24 В., 35А/ч
2. 12 В., 20А/ч
Ищем пути. Как найдем, будем обговаривать, что есть и, что вам нужно.
|
| |
| |
| lori | Дата: Четверг, 23.10.2014, 14:19 | Сообщение # 95 |
|
12 Вольт
Группа: Пользователи
Сообщений: 108
Репутация: 20
Статус: Offline
| 12-ти вольтовый аккумулятор уже не нужен. Да и на 24 вольта уже нашли. Так что спасибо за беспокойство.
|
| |
| |
| lori | Дата: Среда, 29.10.2014, 08:49 | Сообщение # 96 |
|
12 Вольт
Группа: Пользователи
Сообщений: 108
Репутация: 20
Статус: Offline
| Подошло новое оборудование:
1. Драйвер двигателей - 2 канала по 10А на каждый (http://dvrobot.ru/237/736.html). Мощный драйвер для управления двигателями:

Драйвер, который стоял прежде был 2-х канальный 2А. на канал. Явно плохо справлялся с управлениями двигателями. В пике моторы тянули до 3А. на каждый, конечно двухамперник никак не мог с ними справиться, в следствии чего происходил нагрев драйвера и через некоторое время у него начинала срабатывать защита и как следствие LUM начинал очень не уверенно двигаться, с рывками, дерганьем. Установка новой платы управления сняла все эти проблемы.
2. Понижающий модуль (http://dvrobot.ru/242/277.html), для питания KINECT-ов, двигателей и электроники напряжением 12В.:

3. Датчик напряжения, собственно просто резистивный делитель с общей точкой (http://dvrobot.ru/238/359.html):

С установкой этого датчика контролируется напряжение на клеммах аккумулятора
4. Датчик тока, работает по принципу датчика Холла (http://dvrobot.ru/238/398.html):

Этот датчик, в нашем случае, предназначен для измерения тока от аккумулятора.
Оба устройства (датчик напряжения и датчик тока) будут выдавать информацию о состоянии разряда АКБ. На основе этих данных робот будет принимать решение о том когда необходимо ехать на зарядную базу.
Ну и для визуализации потребляемого тока и напряжения питания приобретен цифровой вольт-ампер метр (http://dvrobot.ru/242/301.html):

Все это установлено робота, сейчас подгоняется софт под работу с датчиками.
Кроме того, были проведены испытания робота на длительность работы от новых АКБ (как уже писалось, в LUM-е установлены два аккумулятора по 17А/ч). Результаты испытаний очень обнадежили. При полной "нагрузке" на АКБ - были включены все три сенсора KINECT (работали модули детектирования человека, распознавания и объезда препятствий вдалеке и вблизи робота, работали привода поворота и наклона головы при декретировании фигуры человека (для отслеживания последней)), робот перемещался по помещению т.е. непрерывно работали двигатели платформы - при всех работающих модулях средний ток потребления составил около 3А., при этом робот откатался больше пяти часов к ряду. Первые четыре часа работы не было замечено каких либо проблем, на пятом часу работы стали нагреваться ведущие двигатели платформы, так что пришлось периодически останавливать робота и давать двигателям остыть, остальные модули, при этом, не выводились из работы.
В целом, результат очередных "полевых" испытаний показал весьма хорошую оценку длительности работы робота от аккумуляторных батарей без подзарядки - пять часов непрерывного функционирования. Тем не менее были выявлены и некоторые проблемы с обходом препятствий (о них уже писалось раньше). На сегодня программный код по объезду препятствий исправлен, для тестирования будем ждать очередных испытаний робота.
Кроме этого пришли новые серводвигатели Dynamixel AX-12A Smart Serial Servo (http://www.robotshop.com/en/dynamixel-a ... erial.html):

Этими сервами планируется заменить аналоговые серво-двигатели в приводе головы робота, а так же использовать их в дальнейшем в приводах манипуляторов. Причина замены в низком сроке наработки на отказ потенциометра положения вала двигателя аналоговой сервы. Через какое то, очень не продолжительное время, потенциометр срабатывается и начинает передавать на плату управления не точные данные о положении вала, что приводит к разбалансировке положения последнего и как следствие к "дрожу" головы робота.
Для управления серво-двигателями Dynamixel будет использован специальный шилд предназаначенный для управления цифровыми сервами (http://www.dfrobot.com/index.php?route= ... ption=true):

или напрямую от системной платы через USB посредством адаптера (http://www.robotshop.com/en/robotis-usb ... apter.html):

Это всё на сей день. Работы над проектом ведутся непрерывно, так что думаю, с новостями долго не затянем.
Сообщение отредактировал lori - Среда, 29.10.2014, 13:38 |
| |
| |
| Trooper_OK | Дата: Суббота, 13.12.2014, 18:08 | Сообщение # 97 |
 5 Вольт
Группа: Пользователи
Сообщений: 52
Репутация: 20
Статус: Offline
| Поздравляю с победой!
|
| |
| |
| Serg | Дата: Суббота, 13.12.2014, 19:47 | Сообщение # 98 |
|
Ампер
Группа: Модераторы
Сообщений: 510
Репутация: 28
Статус: Offline
| LUM победил всех??
я ушел раньше, не дождался подведения итогов.
Хотел с LUM-ом сфотографироваться, но журналисты не давали возможности.
Присоединяюсь к поздравлениям!!!
|
| |
| |
| lori | Дата: Воскресенье, 14.12.2014, 20:44 | Сообщение # 99 |
|
12 Вольт
Группа: Пользователи
Сообщений: 108
Репутация: 20
Статус: Offline
| Всем спасибо за поздравления.
Фестиваль прошел просто на УРА! Все было не здорово, а ОЧЕНЬ здорово! Благодарность организаторам и спонсорам. Особенно Фёдору Безручко, а также ДВ-роботу.
LUM не то чтобы "победил всех", просто в номинации подобных проектов не было. Так что это не чистая победа, это как в боксе, если нет соперника то победа присуждается присутствующему участнику, я бы сказал так - это не очень честная победа.
Немного обидел снобизм некоторых жителей города Хабаровска. Мы сами из Комсомольска, но от некоторых хабаровчан, которые об этом узнавали, слышали фразы типа таких: "вы из Комсомольска!?... фи-и-и-и-и! это же деревня!".
Хотелось ответить - да мы из КОМСЫ, из деревни, но в нашей деревне есть этот LUM! а в вашей есть? И теперь вопрос - кто из нас деревня?
А, в целом, "РОБОМЕХ" порадовал общим положительным настроем, свежими идеями и, самое главное, показал что у нас есть золотые руки и светлые головы. Все команды просто молодцы! Не испугались, не струсили, выставили свои идеи и проекты, и пусть кто то не взял на соревнованиях приз, это повод не для расстройства, а стимул работать и совершенствоваться дальше.
Сообщение отредактировал lori - Понедельник, 15.12.2014, 06:56 |
| |
| |
| Serg | Дата: Понедельник, 15.12.2014, 10:17 | Сообщение # 100 |
|
Ампер
Группа: Модераторы
Сообщений: 510
Репутация: 28
Статус: Offline
| От том, что Комсомольск- деревня, знают только комсомольчане, правдами и неправдами перебравшиеся на заработки в Хабаровск. 
|
| |
| |
| lori | Дата: Понедельник, 29.12.2014, 14:46 | Сообщение # 101 |
|
12 Вольт
Группа: Пользователи
Сообщений: 108
Репутация: 20
Статус: Offline
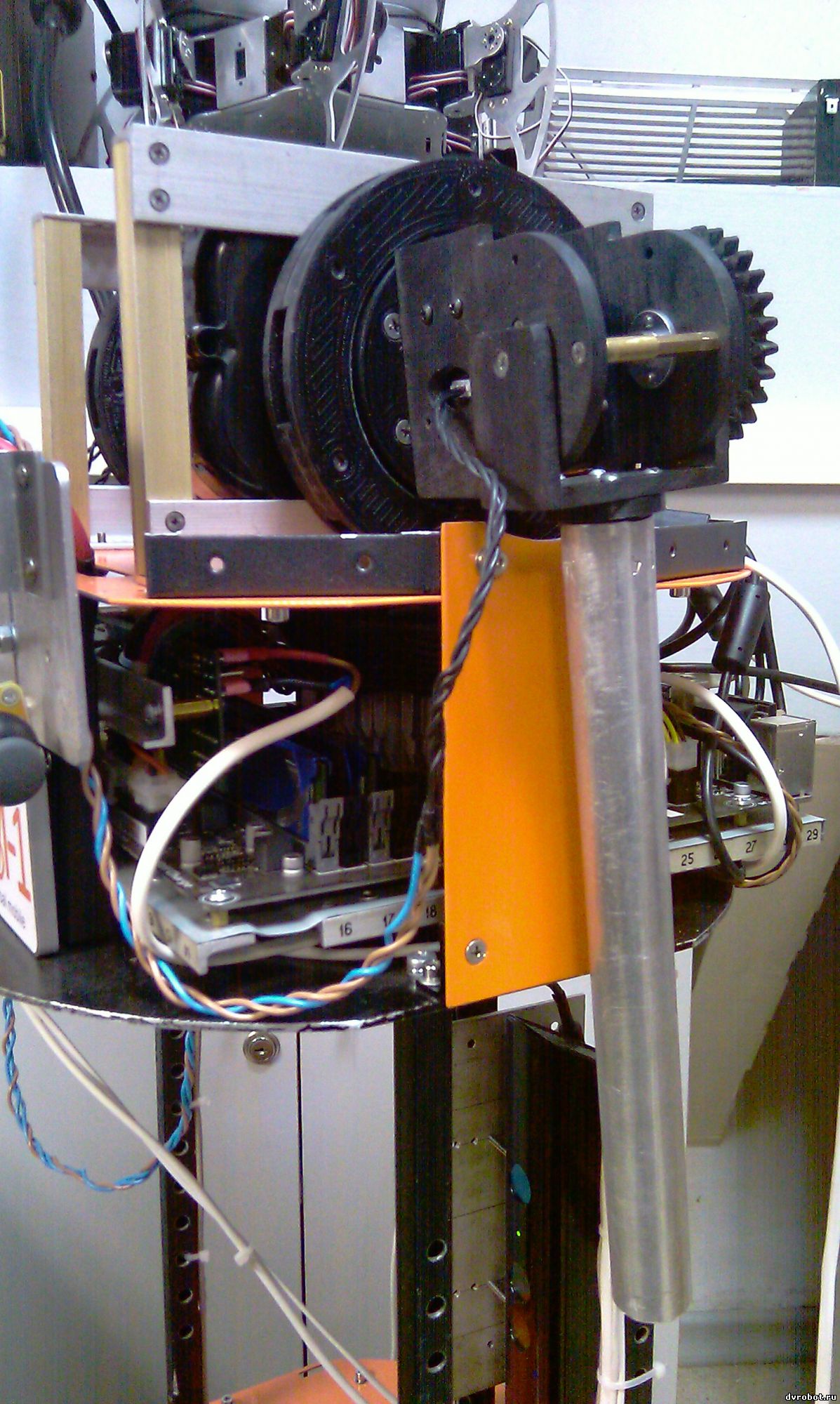
| Занялись вплотную манипуляторами.
Сделали плечевой сустав:

Можно видеть плечевой сустав на испытательном стенде. В плече реализованы две степени свободы. Для поворота плеча вокруг оси используется привод с передачей от детского электромобиля, обратная связь реализована на переменном резисторе. Для подъема плеча в горизонтальной плоскости применен серводвигатель DYNAMIXEL AX-12. Все детали привода плеча напечатаны на 3D принтере.
Вот еще фото:
Вид плечевых суставов со снятой головой сверху

Вид суставов сбоку

Сейчас идет отладка программного обеспечения, привязка библиотек, отработка движения.
Кроме того, ранее был доработан алгоритм обхода препятствий. Вот видео движения робота. Хорошо видно как LUM успешно двигается по весьма загроможденному помещению нашей лаборатории, успешно проходит коридоры и сложные места.
Сообщение отредактировал lori - Понедельник, 29.12.2014, 18:30 |
| |
| |
| Trooper_OK | Дата: Понедельник, 29.12.2014, 19:26 | Сообщение # 102 |
|
5 Вольт
Группа: Пользователи
Сообщений: 52
Репутация: 20
Статус: Offline
| А концевики для крайних положений ставить не будете? или все по резистору отслеживать?
|
| |
| |
| lori | Дата: Понедельник, 29.12.2014, 19:37 | Сообщение # 103 |
|
12 Вольт
Группа: Пользователи
Сообщений: 108
Репутация: 20
Статус: Offline
| Концевики пока ставить не будем, есть только механические ограничители поворота. Считаем, что пока достаточно резисторов, хотя, при откатке манипуляторов может что и изменится.
Сообщение отредактировал lori - Понедельник, 29.12.2014, 19:38 |
| |
| |
| lori | Дата: Вторник, 06.01.2015, 13:42 | Сообщение # 104 |
|
12 Вольт
Группа: Пользователи
Сообщений: 108
Репутация: 20
Статус: Offline
| С Рождеством Христовым!
"Прикрутили" LUM-у руки. Пока только плечевой сустав, упрощенный вариант. Нужно начать отрабатывать движения манипуляторов. Работает только одна степень свободы. На видео хорошо видно как робот повторяет движения за оператором. Это только начало. Дальше пойдет отработка плавности перемещения конечностей, а так же, увеличение количества степеней свободы.
Сообщение отредактировал lori - Вторник, 06.01.2015, 22:18 |
| |
| |
| Trooper_OK | Дата: Четверг, 08.01.2015, 21:34 | Сообщение # 105 |
|
5 Вольт
Группа: Пользователи
Сообщений: 52
Репутация: 20
Статус: Offline
| Здорово!! так и до дистанционного "удлинителя-эмулятора руки" дойдет,можно будет сидя на работе кошку гладить дома). Данные о положении руки с одного контроллера кинект берется ?
Сообщение отредактировал Trooper_OK - Четверг, 08.01.2015, 21:35 |
| |
| |
| lori | Дата: Пятница, 09.01.2015, 00:03 | Сообщение # 106 |
|
12 Вольт
Группа: Пользователи
Сообщений: 108
Репутация: 20
Статус: Offline
| Цитата Trooper_OK ( ) Данные о положении руки с одного контроллера кинект берется ? |
| |
| |
| lori | Дата: Суббота, 28.02.2015, 06:10 | Сообщение # 107 |
|
12 Вольт
Группа: Пользователи
Сообщений: 108
Репутация: 20
Статус: Offline
| Что то давно не писал я ничего по нашему проекту!
И есть новости, не плохие.
1. на базе одной из организаций наша команда смогла открыть лабораторию робототехники. И название для лаборатории уже имеется, и логотип придумали. Так что, уважаемые господа, презентуем вам лабораторию "Конструирования Интеллектуальных Систем", сокращенно "лаборатория КИС".
Вот ее логотип, если где то увидите, знайте это мы.

2. Работы над роботом продолжаются. Научили LUM-а не просто "тупо" махать руками повторяя движения человека, а обучили робота понимать жесты. Таким образом LUM-мом сейчас можно управлять при помощи жестов. Правда, пока робот понимает только три жеста:
ВНИМАНИЕ - робот прекращает любые свои операции и переходит в режим получения команды жестом;
ПОВТОРЯЙ ЗА МНОЙ - робот начинает повторять за человеком движения руками;
СЛЕДУЙ ЗА МНОЙ - робот движется за человеком подавшим команду сохраняя дистанцию в 1,3 м.
Как сделаем видео, выложу.
3. Окончательно принято решение переводить робота на "новые рельсы". Это я о том, что LUM будет работать под ROS. Но скорее всего и винда еще какое то время останется, пока все способности робота не будут перенесены на новую программную платформу.
4. И главная новость!
Нашей лаборатории было предложено поучаствовать и выставить свой проект "Универсальная роботизированная платформа - робот LUM" на питч-сессии с экспертами Сколково, которая состоялась 25.02.2015 в КнАГТУ. По результатам питч-сесси нам, с нашим проектом (робот LUM), было рекомендовано стать резидентами Сколково (это КРУТО!!!). Признаться, мы совсем не ожидали такого поворота, шли на питч-сессию ради того чтобы побольше обозначиться с нашим проектом, а тут вышло так, что не просто обозначились, но представлены на получение резиденства.
Вот ссылка на статью о сессии:
http://www.dvnovosti.ru/komsomolsk/2015/02/26/31025/
Сообщение отредактировал lori - Суббота, 28.02.2015, 06:22 |
| |
| |
| Serg | Дата: Суббота, 28.02.2015, 22:04 | Сообщение # 108 |
|
Ампер
Группа: Модераторы
Сообщений: 510
Репутация: 28
Статус: Offline
| Поздравляю! И чем это грозит LUM-у?
|
| |
| |
| lori | Дата: Воскресенье, 01.03.2015, 10:41 | Сообщение # 109 |
|
12 Вольт
Группа: Пользователи
Сообщений: 108
Репутация: 20
Статус: Offline
| Резидент Сколково это возможность получения гранта под проект, нулевые налоговые ставки в случае ведения коммерческой деятельности в рамках проекта, и соответствующая "бумажка" которой можно похвастаться. Ну и конечно статус "резидент Сколкова" это просто КРУТО!!!
|
| |
| |
| lori | Дата: Пятница, 29.05.2015, 07:05 | Сообщение # 110 |
|
12 Вольт
Группа: Пользователи
Сообщений: 108
Репутация: 20
Статус: Offline
| В общем так, Сколково нас кинуло  , собственно чего и следовало ожидать, мы только время на это потратили зря. Ну, да ничего, продолжаем работать над LUM-ом. , собственно чего и следовало ожидать, мы только время на это потратили зря. Ну, да ничего, продолжаем работать над LUM-ом.
В нашем городе прошел фестиваль "Технофест 2015" где мы весьма удачно продемонстрировали своих роботов.
А новости по проекту такие:
1. сменили голову Люму, теперь она более похожа на робота, кроме того добавили роботу рот на основе светодиодной матрицы, во время разговора робот шевелит губами, а также меняет форму рта при смене настроения (вышло классно)
2. начали делать корпус для того чтобы закрыть детали и провода
3. вплотную занялись ROS-ом
4. научили робота говорить, теперь он при обнаружении человека говорит всякие фразы, а при потере прощается с ним.
Эта "говорилка" на прошедшем фестивали произвела просто фурор! Дети (да и взрослые тоже) косяками ходили за роботом, прохода ему не давали, фотографировались с ним. LUM при этом благопристойно и чинно катался по залу, аккуратно объезжая препятствия и людей и выдавая налево и направо всякие перлы. В общем шоу с нашим LUM-ом удалось.
Мы же получили большой заряд энергии для последующей работы.
|
| |
| |