|
Робот-платформа
|
|
| lori | Дата: Вторник, 26.03.2013, 11:49 | Сообщение # 1 |
 12 Вольт
Группа: Пользователи
Сообщений: 108
Репутация: 20
Статус: Offline
| Представляем проект роботизированной платформы. Эту платформу наша небольшая команда собирает самостоятельно. Контроллер Arduino MEGA2560, два двигателя с энкодерами от роботов-пылесосов, датчики расстояния спереди и сзади, бампер столкновения, датчики перепада высоты на уровень пола. На сегодняшний день платформа работает, управляется с компьютера (пока только вручную - человеком), реагирует на препятствия.
В перспективе планируется установить на платформу Microsoft Kinect, для ориентирования в пространстве, распознавания жестов и т.п., камеру с использованием библиотеки компьютерного зрения OpenCV.
Предполагается что платформа обзаведется манипуляторами (для начала просто будет подобие рук со свободой вверх-вниз). В итоге должен получится презентационный робот которого можно будет использовать как рекламу в магазине, на выставке, а так же дома или в офисе.
Но есть проблемы - не знаем какую выбрать управляющую программу на ПК для работы робота, есть варианты: ROS (под Linux) или Microsoft Robotics Developer Studio, но нет нужного опыта для работы с ними, а можно самим написать основываясь на уже готовых, созданных кемто и когда то алгоритмах. В любом случае, каким бы путем не пойдем - придется изучать с нуля.
Может кто чем поможет? Или что посоветует? Если кому интересно пишите.

Сообщение отредактировал lori - Среда, 13.11.2013, 07:41 |
| |
| |
| Ivan-771 | Дата: Вторник, 26.03.2013, 15:40 | Сообщение # 2 |
 5 Вольт
Группа: Пользователи
Сообщений: 39
Репутация: 0
Статус: Offline
| Использовать ATmega2560, неплохо но для создания искусственным интеллектом маловато будет.
Microsoft Kinect, вы знаете как он работает(знаете как обработать)?
|
| |
| |
| lori | Дата: Вторник, 26.03.2013, 15:59 | Сообщение # 3 |
|
12 Вольт
Группа: Пользователи
Сообщений: 108
Репутация: 20
Статус: Offline
| Да это и понятно, что Arduino для AI не подойдет, для этого PC будет использован на котором и будет "крутиться" ROS или MRDS (НАРОД! кто нибудь работал с этими программами? Помогите в освоении, кто может!!!!), а ардуинка используется только как контроллер двигателей и датчиков. К стати, планируем перейти на Arduino DUE, там и проц 32-х разрядный, и частота 84 МГц против 16 МГц в простой ардуино. Но, с этим проблем особых не возникает, больше беспокоит то, какие "мозги" т.е. какая программа будет управлять всем этим на PC.
До кинекта дело еще не дошло, но в нэте уйма примеров работы и обработки как раз под ROS и MRDS, а этих "монстров" особенно ROS еще освоить нужно и с этим как раз загвоздка.
|
| |
| |
| lori | Дата: Четверг, 28.03.2013, 16:16 | Сообщение # 4 |
|
12 Вольт
Группа: Пользователи
Сообщений: 108
Репутация: 20
Статус: Offline
| На самом деле наша команда работает над несколькими проектами, тот что расписан в первом посте на фото ниже:
Вот еще одна платформа:
В общем то это разные платформы использующие один и тот же но несколько модифицированный для каждой платформы программный код. Кроме ИК датчиков, УЗ датчиков и бампера спереди, платформы оснащены электронным компасом для улучшения ориентации в помещении. У второй платформы более мощные колесные двигатели, увеличенный клиренс и диаметр колес, что значительно улучшает проходимость платформы.
Сейчас ведется работа по подключению платформы к ПК и настройке компьютерного зрения - openCV.
 
|
| |
| |
| muvey | Дата: Четверг, 28.03.2013, 20:04 | Сообщение # 5 |
 220 Вольт
Группа: Пользователи
Сообщений: 305
Репутация: 1
Статус: Offline
| lori, вторая машинка вродь ничего получилась.. :)Она на поводке,как я понял?Когда будет автономна?Видео будет?
Так и просится две руки,с 20-ю степенями свободы...
Ex nihilo nihil fit
Сообщение отредактировал muvey - Четверг, 28.03.2013, 20:09 |
| |
| |
| lori | Дата: Пятница, 29.03.2013, 13:23 | Сообщение # 6 |
|
12 Вольт
Группа: Пользователи
Сообщений: 108
Репутация: 20
Статус: Offline
| Обе платформы автономные, просто фотография сделана в то время когда в ардуинку "заливали" новый скетч (программу). Платформы должны будут нести на себе ноутбук как центральные мозги, именно в ПК будет обрабатываться информация с кинекта и видеокамер. Компьютер должен приниматься решения о дальнейшем поведении платформы на основании данных полученных от датчиков платформы, результатов обработки видео информации и данных с кинекта, а так же предполагается подключить модуль распознавания речи на основе API google, и добавить синтез речи. В общем робот должен будет адекватно реагировать на присутствие человека, отличать людей от стульев и столов, пытаться вести беседу с человеком, ориентироваться в окружающей обстановке. Если робот будет работать в квартире, то планируется подключение к системам "умный дом". Разумеется все это через wi-fi и интернет. Можно будет удаленно управлять роботом, следить за его работой, получать видео с камер и аудио с микрофонов робота, а так же передавать через интернет на робота аудио поток, т.е. робот кроме всего прочего сможет нести функции телеприсутствия. Ручки тоже планируется приладить, но возможно робот не сможет самостоятельно (без управления человеком) брать и переносить предметы, эти алгоритмы пока сложны, хотя вполне решаемы. Может что и придумают к тому времени как будем заканчивать проект. Ведь когда все начиналось была огромная проблема с распознаваниеми и синтезом речи, а сейчас google ее разрешил. В общем планы большие, только вот времени бы побольше свободного, да мозгов.
Вопрос модератору. Перенесите, пожалуйста, эту тему в "Проекты". Я так понял что ее убрали оттуда по причине моих просьб о помощи в самом первом посте, это было просто обращение к робото-творцам, может кто и откликнется, а так, это вполне самостоятельный проект, так что прошу вернуть тему в "проекты".
Сообщение отредактировал lori - Среда, 13.11.2013, 07:46 |
| |
| |
| Serg | Дата: Пятница, 29.03.2013, 21:30 | Сообщение # 7 |
|
Ампер
Группа: Модераторы
Сообщений: 510
Репутация: 28
Статус: Offline
| Проект закрытый? Публиковать не будете?
|
| |
| |
| lori | Дата: Суббота, 30.03.2013, 12:14 | Сообщение # 8 |
|
12 Вольт
Группа: Пользователи
Сообщений: 108
Репутация: 20
Статус: Offline
| Проект открытый.
Готовы поделиться всеми наработками которые имеем на сегодня и которые будут в дальнейшем.
Главное, чтобы были желающие воспринять полученный нами опыт и знания, а если имеют чем поделиться, то поделились.
Команда наша состоит из четырех человек. Один занимается "железом", железом в прямом смысле этого слова - пилит, сверлит, крутит, заворачивает винты и гайки, в общем, отвечает за технологическую часть проекта, собирает платформу саму, у человека руки и голова, как говорится, "на месте". Второй занимается созданием программного обеспечения для контроллера Arduino, это получение данных от датчиков, первичная их обработка, управление двигателями, передача и получение данных с компьютера. Двое других занимаются "мозгами" проекта, т.е. той стороной программного обеспечения, которая работает на ПК. Один парень специалист по Linux, второй по Windows. Проект ведется по двум этим направляющим, я имею в виду Linux и Windows, по той причине что мы пока не знаем под какой операционкой будет работать робот. Как я уже писал - среди моножества программ для управления роботами мы пока остановились на ROS и MRDS, что будем использовать, зависит от того какая из них окажется проще в освоении и функциональнее, хотя может и сами чего напишем (ежели тяму хватит).
Если кого что интересует подробнее спрашивайте. В дальнейшем планирую рассказать подробнее, выложить фото, видео и исходники
Сообщение отредактировал lori - Среда, 13.11.2013, 16:55 |
| |
| |
| GRACH | Дата: Вторник, 02.04.2013, 11:05 | Сообщение # 9 |
 dvrobot.ru
Группа: Администраторы
Сообщений: 111
Репутация: 16181
Статус: Offline
| lori, Время доброе!!
Скажите, а Вы из какой части России? Какой город?
Мы считаем, что Ваш проект очень инетресен и перспективен,найдется много пользователей которым Вы сможете помочь.Так как с Ваших слов проект открытый, выкладывайте на страницы нашего
форума всю подробную информацию, шаг за гагом, пишите обсолютно ввсе, пусть страницы нашего форума будут своего рода Вашим " Дневником проекта". Желательно наличие
фотографий и видео. Компания "ДВ Робот" в свою очередь готова оказывать Вам материальную и базовую поддержку.
Надеемся на тесное сотрудничество. Если естьвопросы пишите тут или на dvrobot@yandex.ru
P.S. В связи с глобальностью Вашего проекта,готовы выделить Вам новый раздел, ориентированный на Ваш проект. Или хотите тут в общем разделе ?
|
| |
| |
| lori | Дата: Пятница, 05.04.2013, 07:18 | Сообщение # 10 |
|
12 Вольт
Группа: Пользователи
Сообщений: 108
Репутация: 20
Статус: Offline
| GRACH, доброго времени суток!
Мы с вами земляки - дальневосточники, вся наша команда, о коей я писал выше, из Комсомольска-на-Амуре, там, собственно, проживаем и работаем.
Благодарим за предложение помощи, непременно воспользуемся :).
Благодарим за возможность ведения "Дневника проекта". Сейчас начинаем готовить материалы к публикации. Дело в том, что проект ведется уже более полугода, и толком ничего не документировалось, это конечно большой пробел. Хорошо что можно будет опубликовать все материалы на форуме, это и нас организует, и другим "робото-строителям" не малую помощь окажет в создании и продвижении своих идей и проектов. Как только появятся первые печатные, более-менее внятные материалы, сразу начнем публиковать.
По поводу "глобальности" проекта, это громко сказано, и думаю, что нового раздела не стоит выделять, во всяком случае пока. Посмотрим как дальше дело пойдет, мы то конечно намерены довести проект до конца, а вот народ наш в целом не очень то активен. Я имею в виду то, что дальше банальных роботов на основе зубной щетки и вибратора от сотового телефона, дело не идет. Поройтесь на наших Российских робо-сайтах и загляните на западные, поверьте, мы еще в "каменном веке" находимся, по сравнению с ними, уровень наших проектов очень низок. Мне, как сказал один известный герой из известного фильма, - "за Державу обидно".
В общем, готовы вести дело и дальше, надеемся на вашу поддержку и помощь, а так же на поддержку и помощь других пользователей сайта "DVrobot".
По мере публикации материалов на арену будут выходить другие участники нашего проекта, с теми разделами которые они ведут.
На этом пока все.
|
| |
| |
| GRACH | Дата: Суббота, 06.04.2013, 02:37 | Сообщение # 11 |
|
dvrobot.ru
Группа: Администраторы
Сообщений: 111
Репутация: 16181
Статус: Offline
| lori,
Отлично!!! Тогда работаем !!!
|
| |
| |
| lori | Дата: Среда, 08.05.2013, 14:38 | Сообщение # 12 |
|
12 Вольт
Группа: Пользователи
Сообщений: 108
Репутация: 20
Статус: Offline
| Спустя больше чем месяц после последней публикации наконец нашел время разместить фотосессию наших платформ.

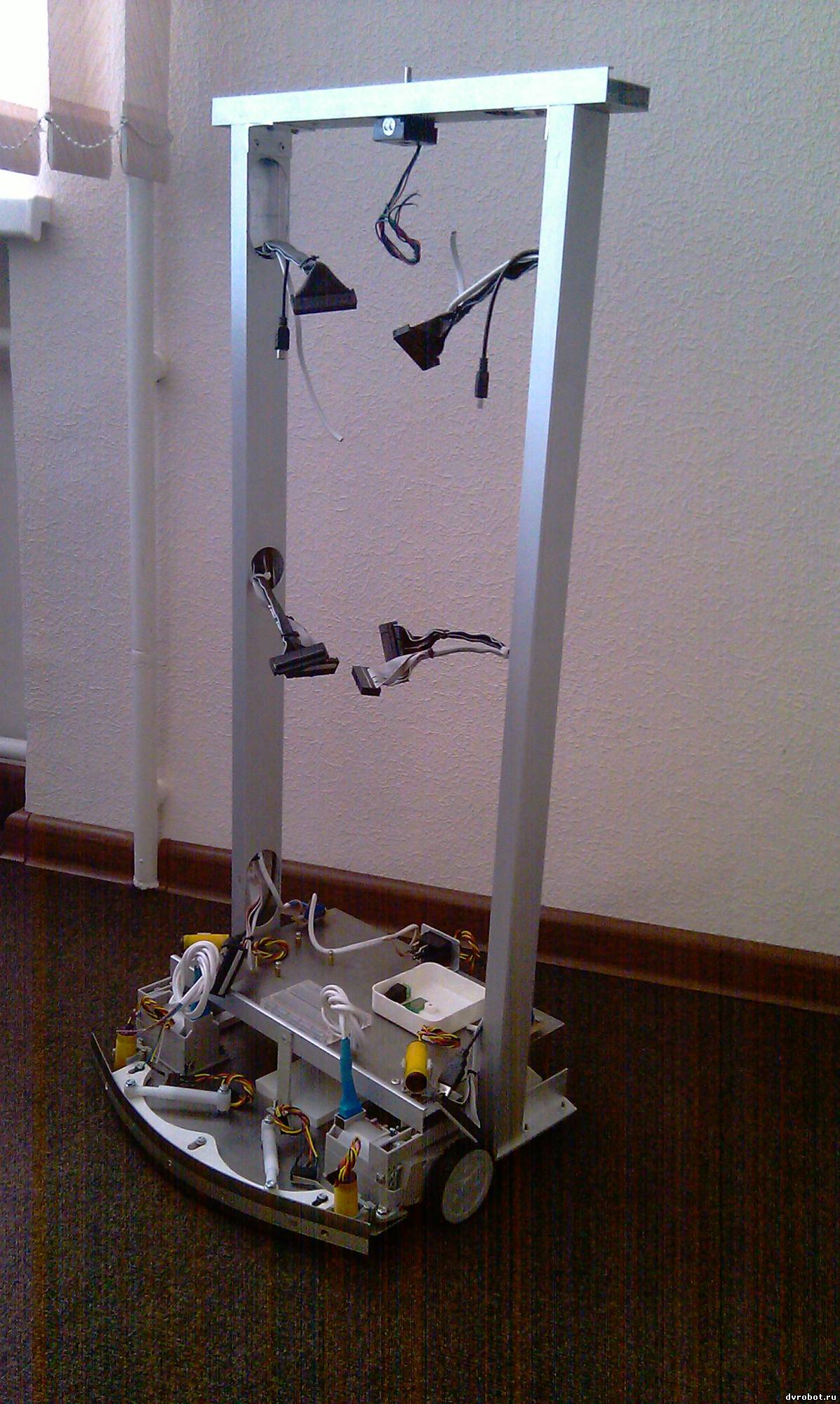
Вот два близнеца-брата разработка по которым сейчас ведется. Это, так сказать, скелеты конструкции на который будут нанизаны все остальные элементы робота.
 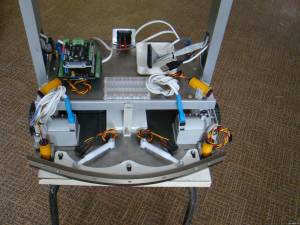 
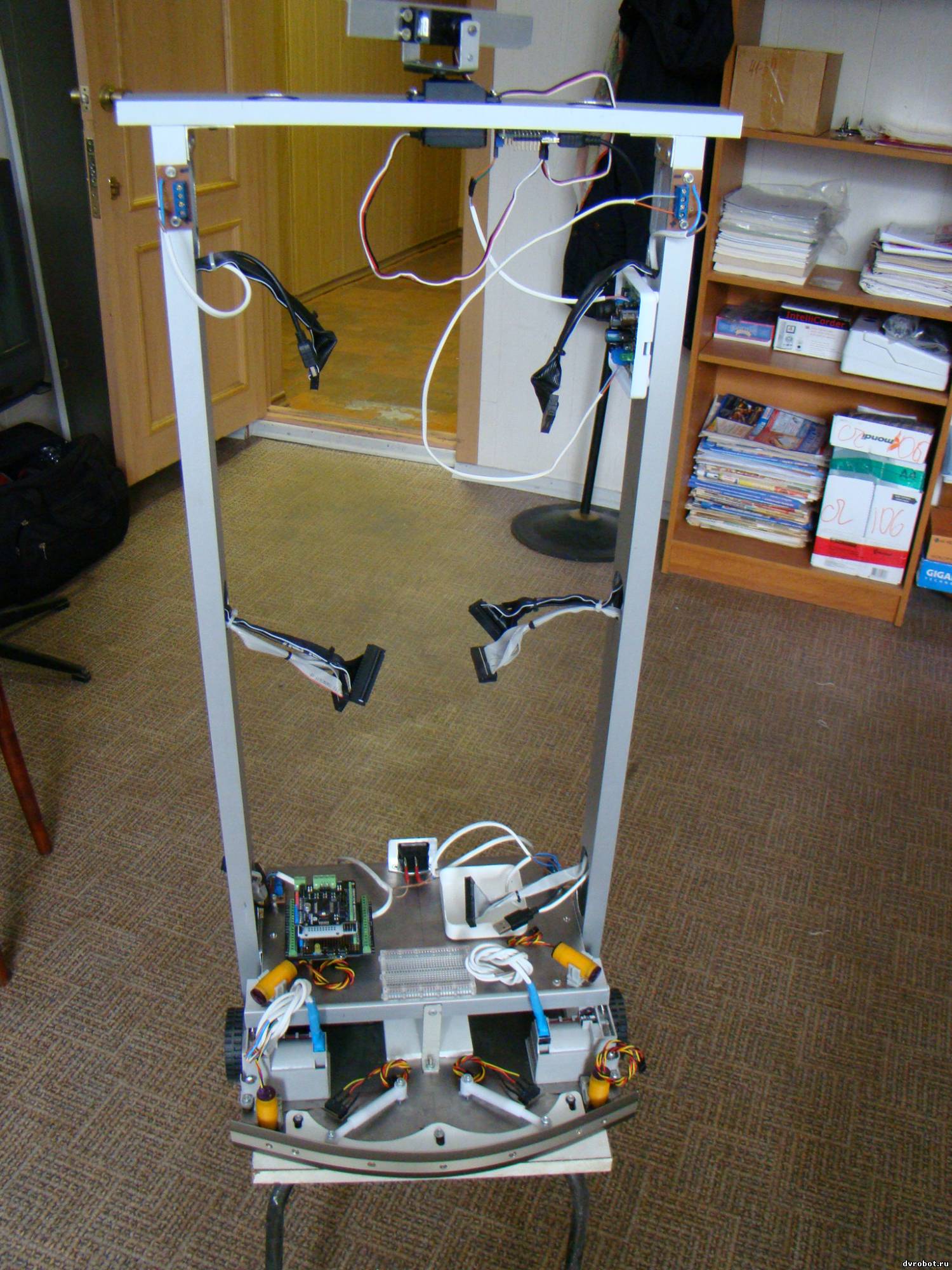
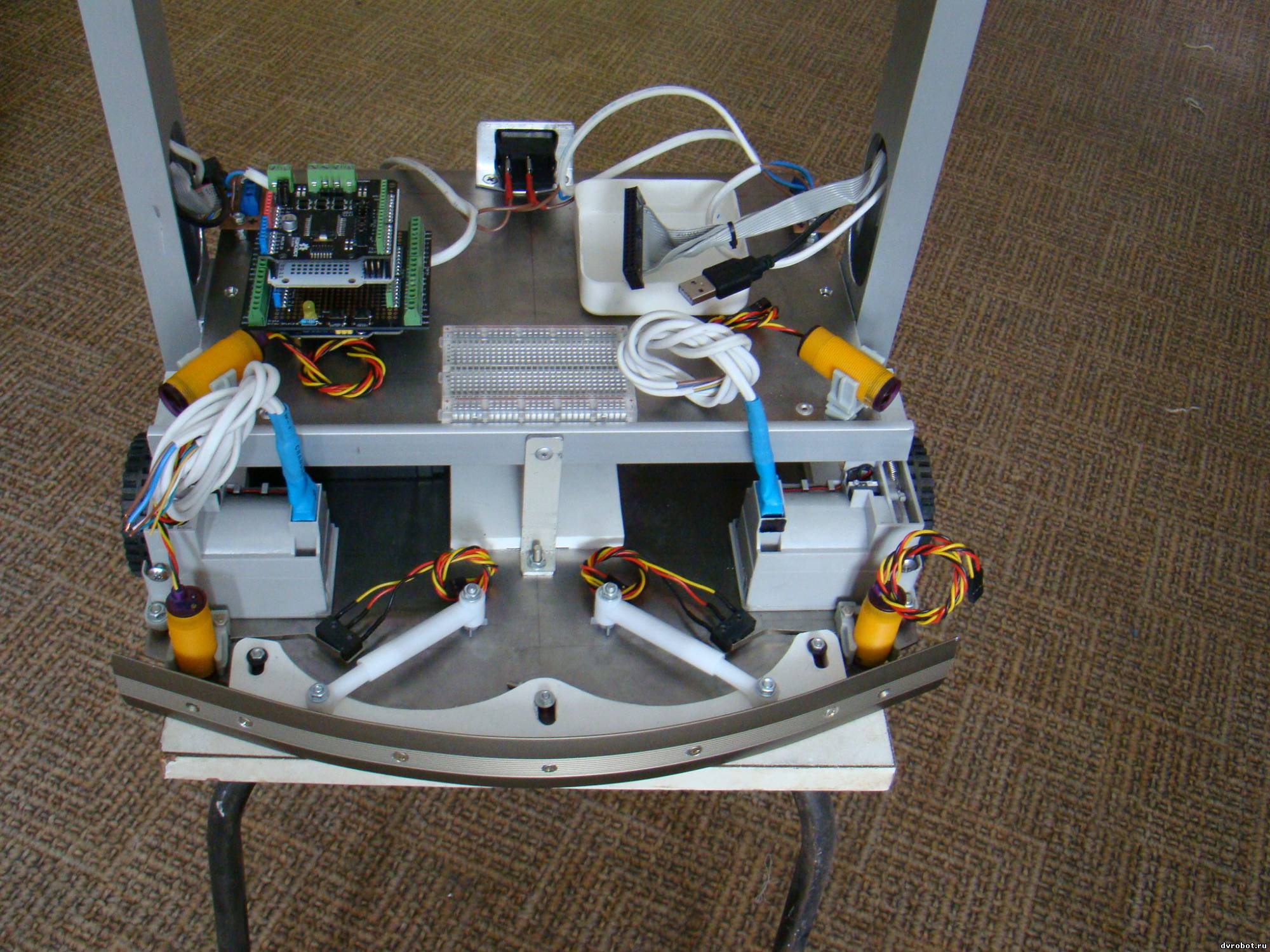
Это виды по отдельности, общий план робо-платформы, укрупненный вид и вид платформы сзади. Как можно видеть платформа оборудована контроллером Arduino, массой всевозможных датчиков, контроллеров двигателей и серво-двигателей. Так как предполагается что платформа будет многоярусная, то к каждому ярусу (этажу) робота проведены информационные, питающие и другие кабели.

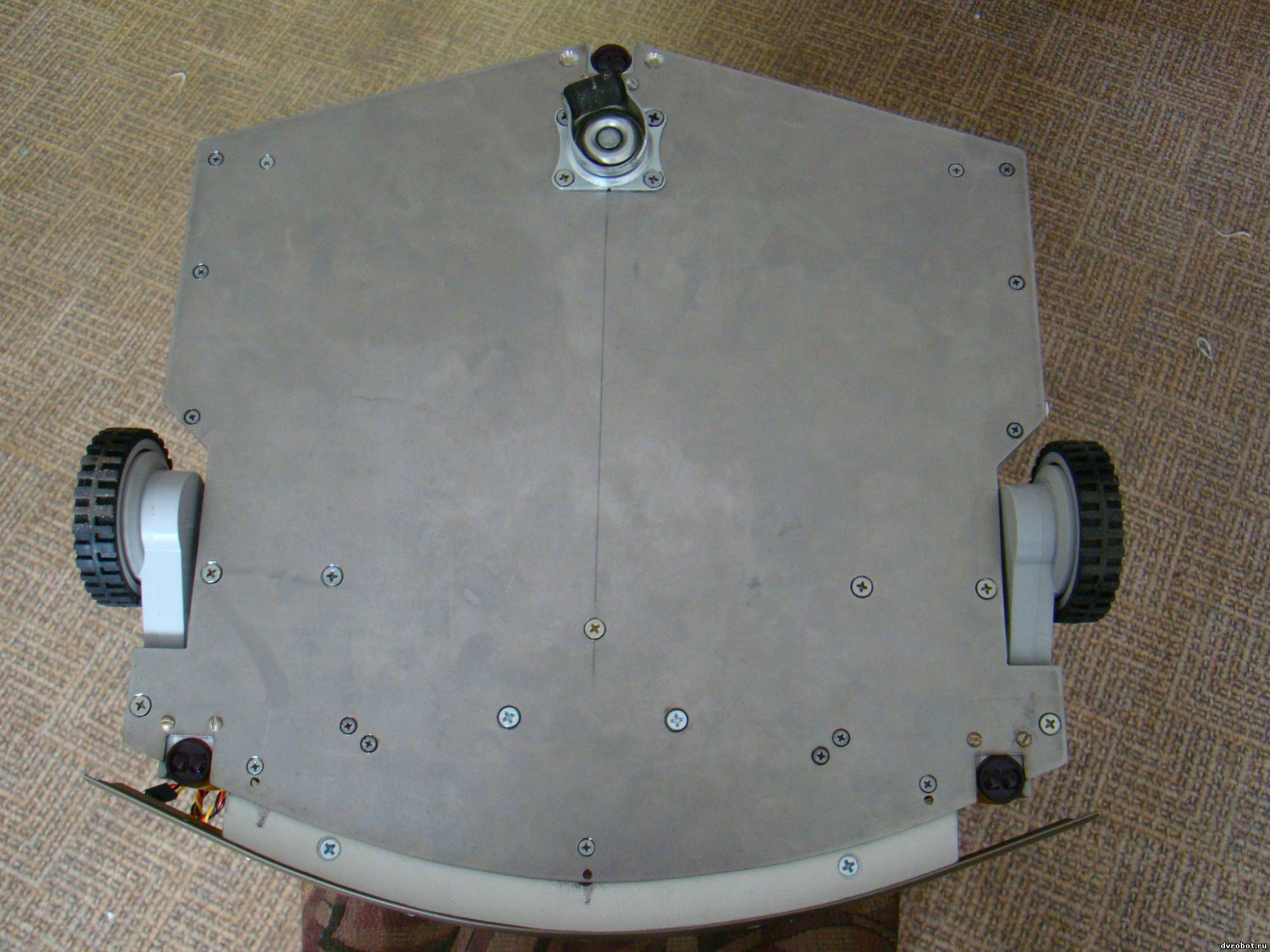
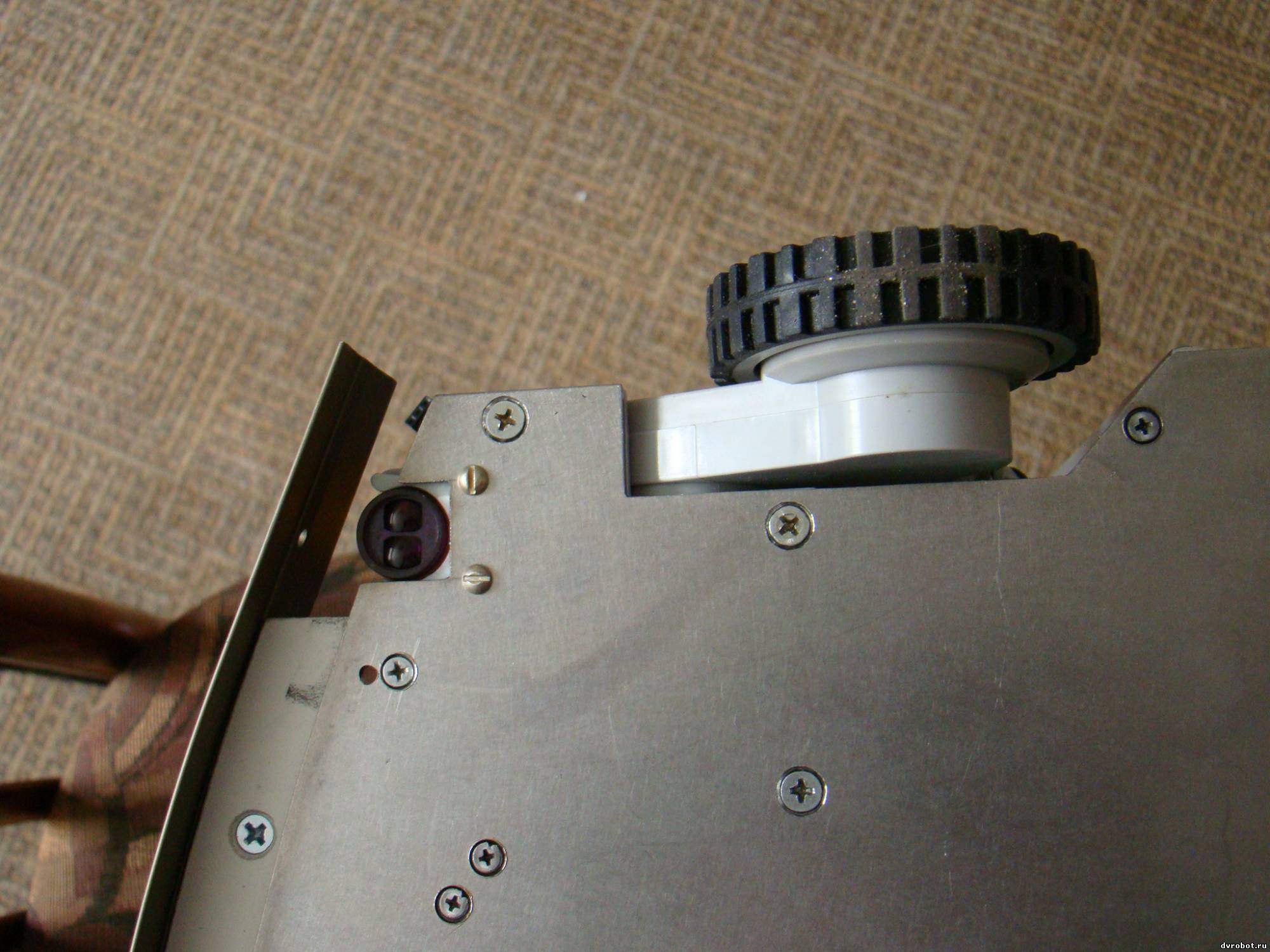
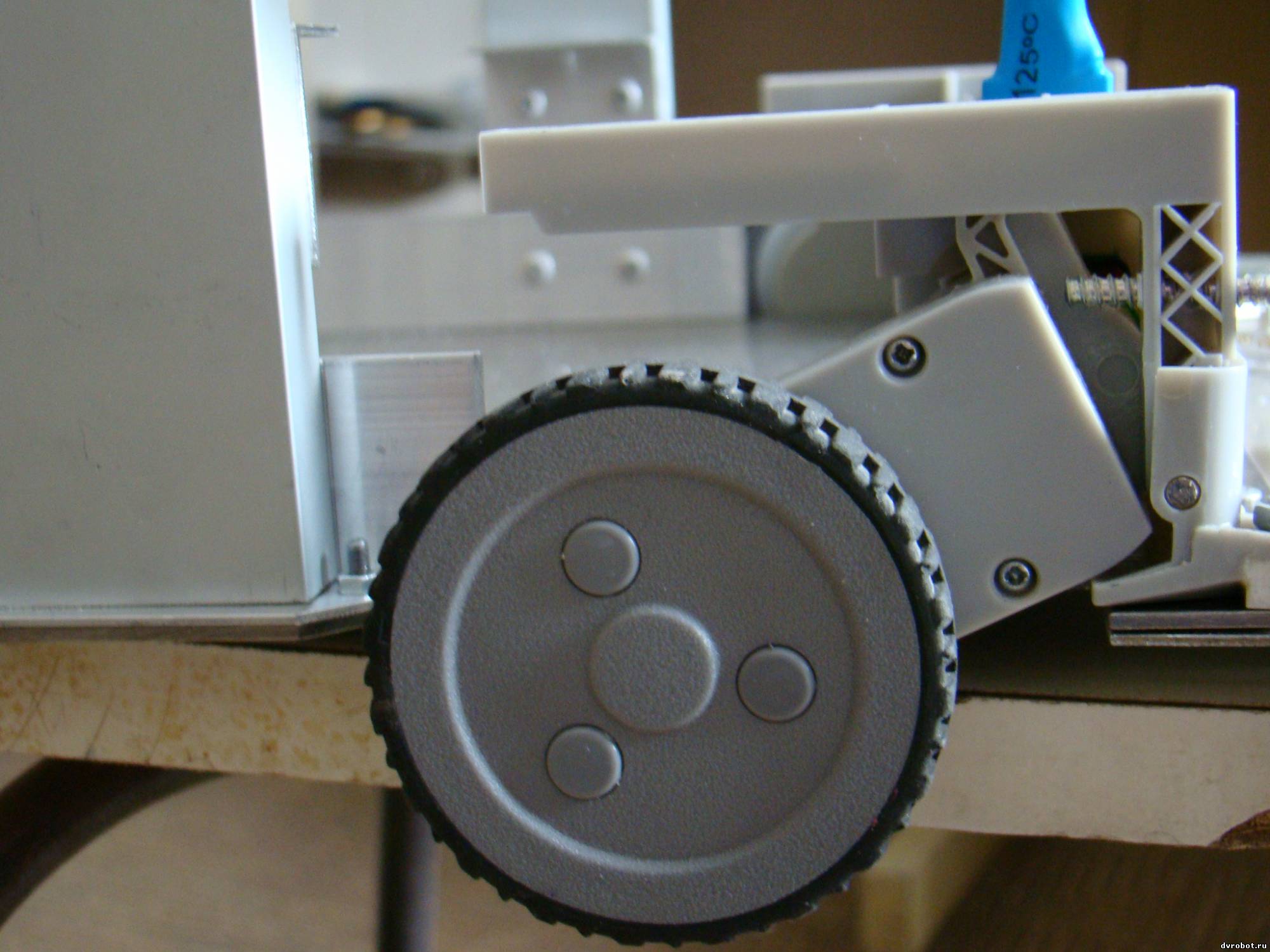
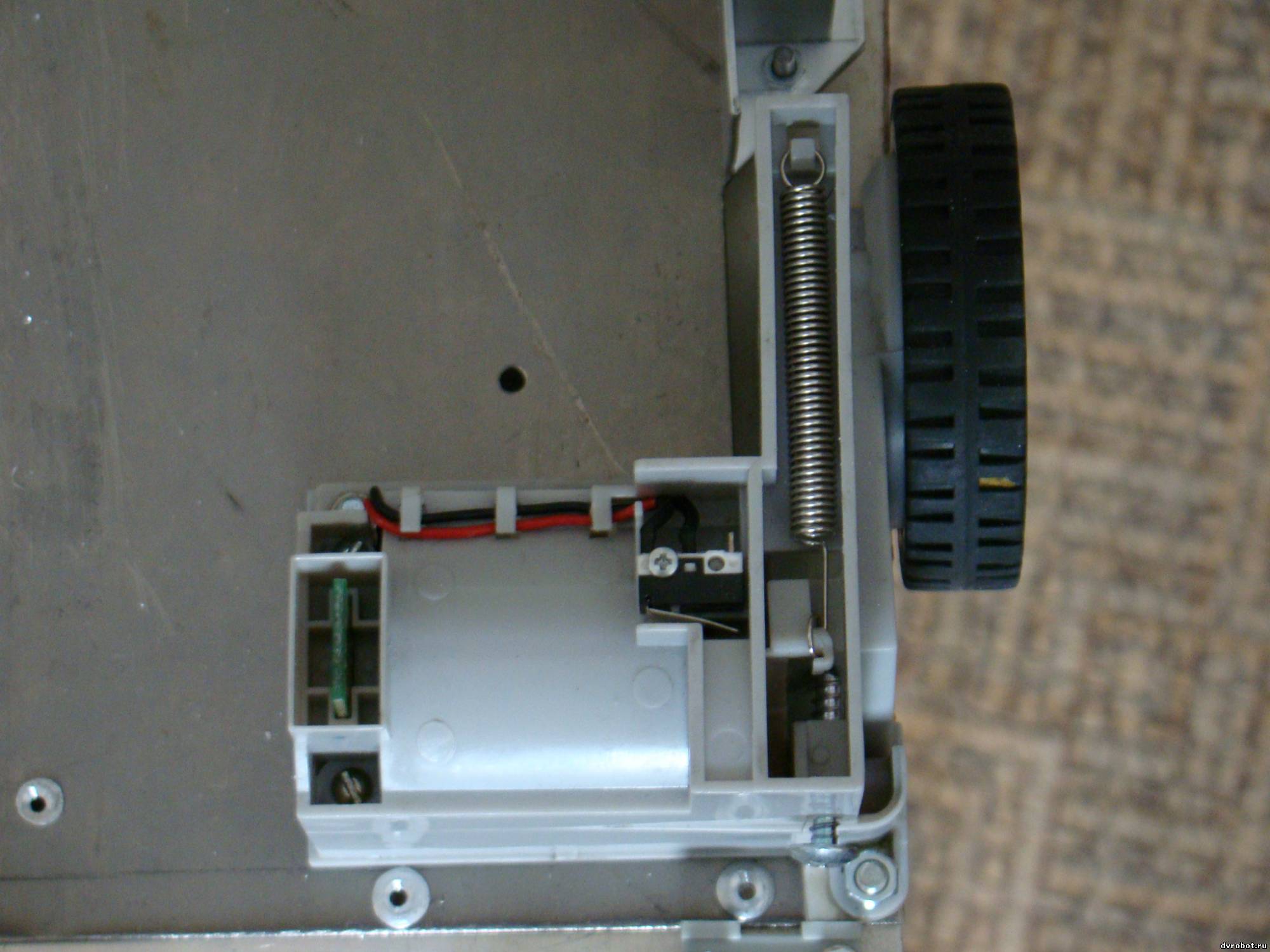
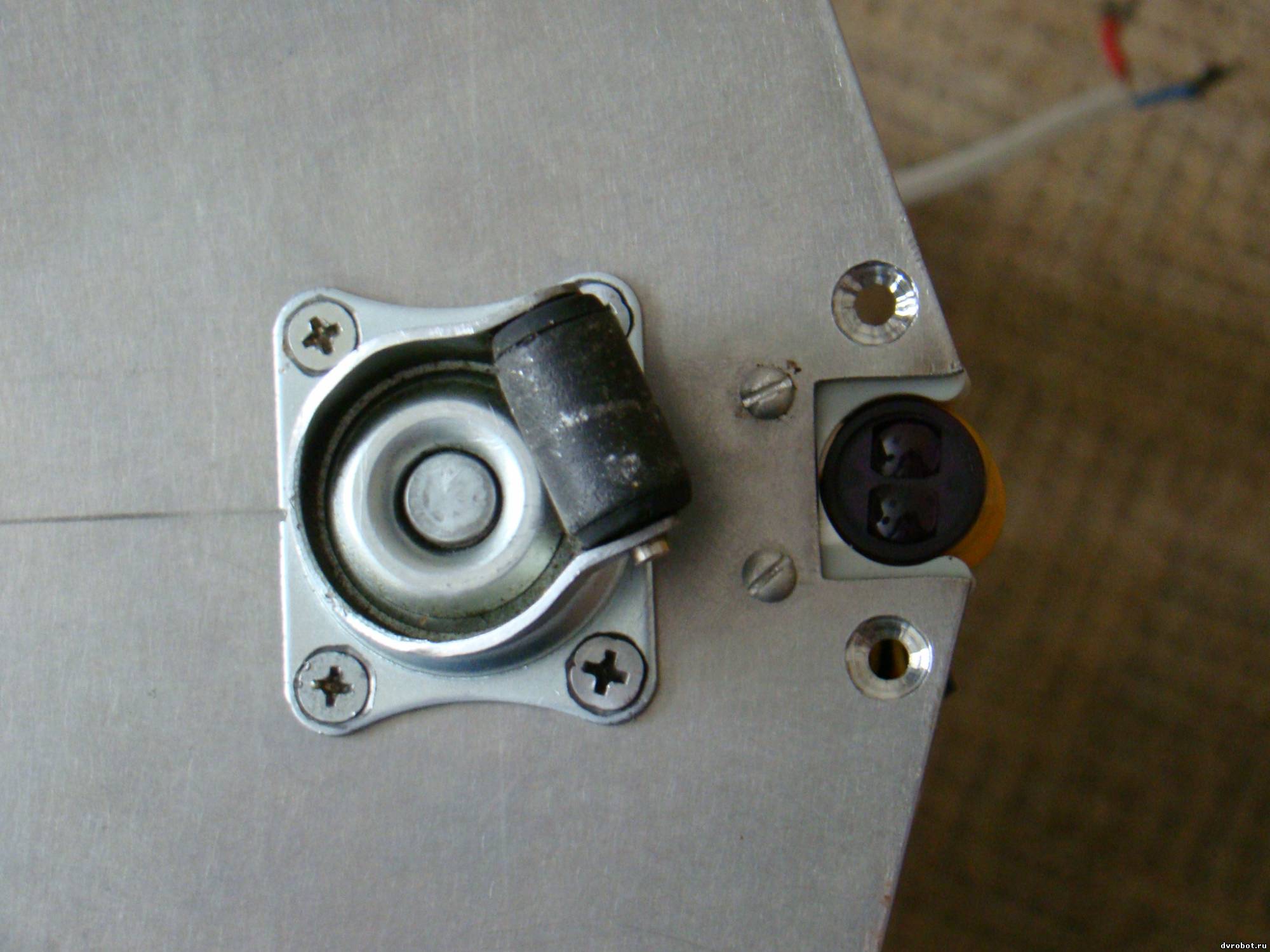
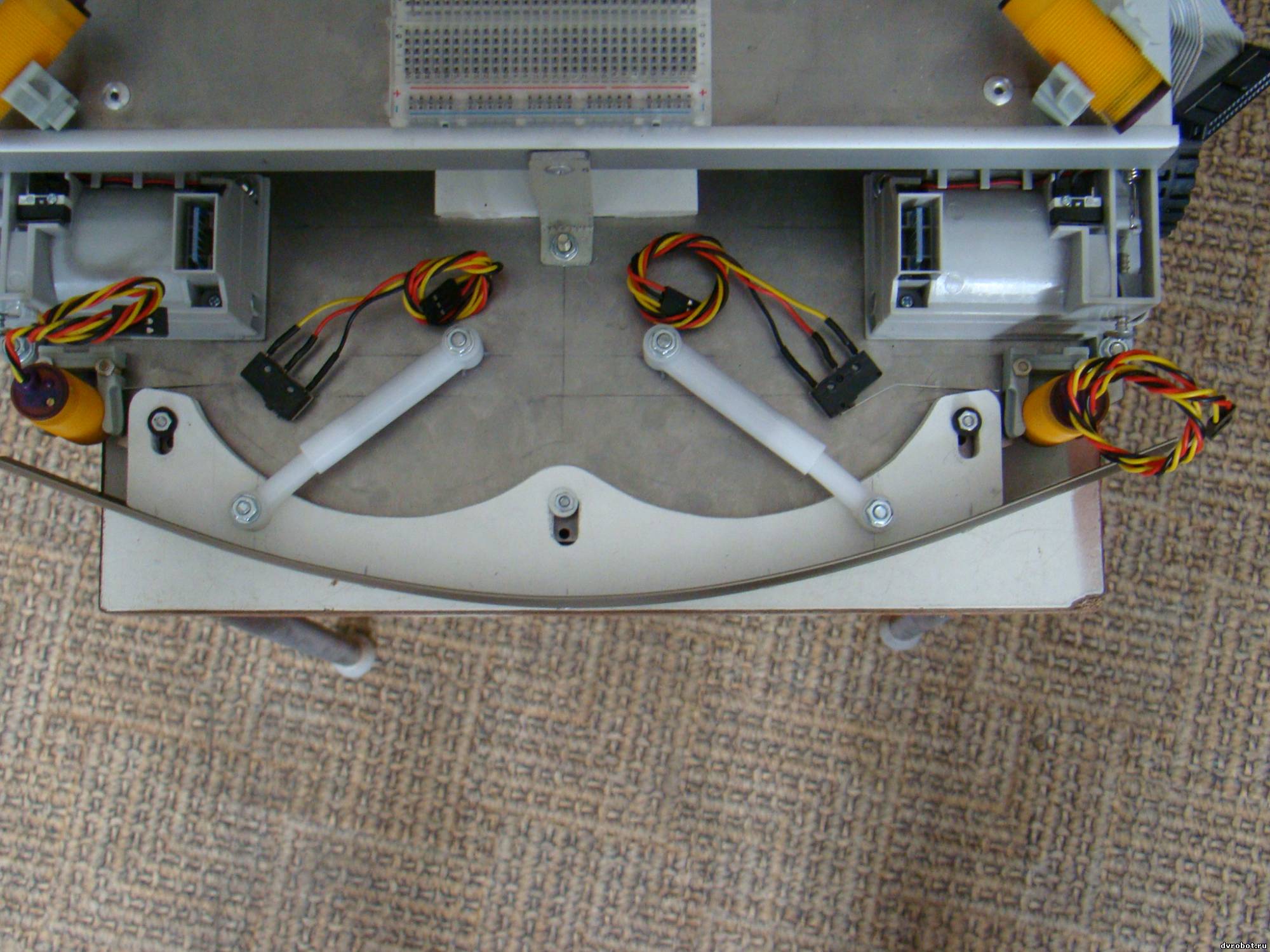
Снизу платформа выглядит следующим образом:

Как можно заметить у платформы имеется два независимых колеса с коллекторными двигателями:
 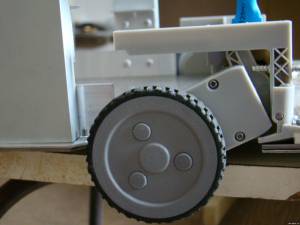 
Одно подруливающее колесо используемое как третья точка опоры:

Сообщение отредактировал lori - Среда, 13.11.2013, 17:05 |
| |
| |
| lori | Дата: Среда, 08.05.2013, 17:08 | Сообщение # 13 |
|
12 Вольт
Группа: Пользователи
Сообщений: 108
Репутация: 20
Статус: Offline
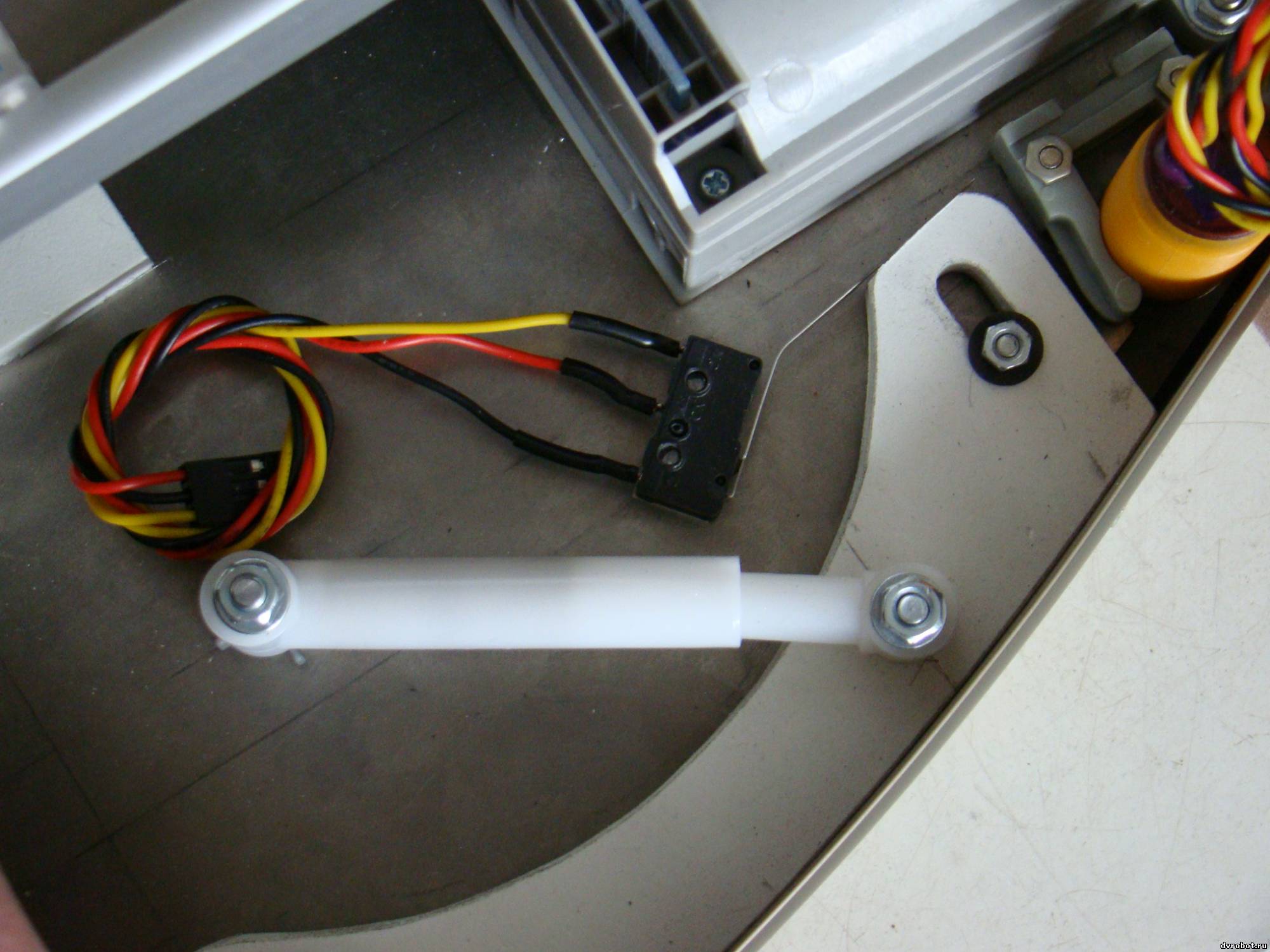
| В передней части робота расположен бампер предназначенный для отработки соприкосновения с предметами которые возможно будут встречаться роботу при движении вперед:
 
В верхней части платформы мы расположили узел головы, ниже фото как это выглядет. Самой головы конечно пока нет, но в скором времени приладим.

Вот пока все, если что интересно спрашивайте
Добавлено (08.05.2013, 17:08)
---------------------------------------------
Не смог вставить видео, администратор, подскажите как это сделать?
Сообщение отредактировал lori - Среда, 13.11.2013, 07:52 |
| |
| |
| Serg | Дата: Среда, 08.05.2013, 18:19 | Сообщение # 14 |
|
Ампер
Группа: Модераторы
Сообщений: 510
Репутация: 28
Статус: Offline
| Видео вставить нельзя. Только ссылку на видео со стороннего ресурса. Это связано с тем, что размер форума ограничен - он менее 1 Гб.
|
| |
| |
| lori | Дата: Понедельник, 03.06.2013, 07:27 | Сообщение # 15 |
|
12 Вольт
Группа: Пользователи
Сообщений: 108
Репутация: 20
Статус: Offline
| На днях установили библиотеку компьютерного зрения openCV в C++ под Visual Studio 2012. Теперь наш робот обзавелся зрением, хотя, нужно сказать, что с библиотекой еще придется поработать, т.к. функционал у нее очень большой и нужно научиться все заложенное в ней грамотно использовать.
Работы по ROS-у несколько тормознулись, есть некоторые проблемы с коммуникацией ROS-Arduino, но думаю это временное явление, разберемся.
Кроме того полным ходом идут работы с самой платформой. На днях получили от DVROBOT (спасибо коллеги!!!  ) посылочку с некоторыми элементами для будущих рук и головы нашего робота. К стати, заготовка для изготовления корпуса головы нашего робота почти готова и даже прилажена к самой платформе. ) посылочку с некоторыми элементами для будущих рук и головы нашего робота. К стати, заготовка для изготовления корпуса головы нашего робота почти готова и даже прилажена к самой платформе.
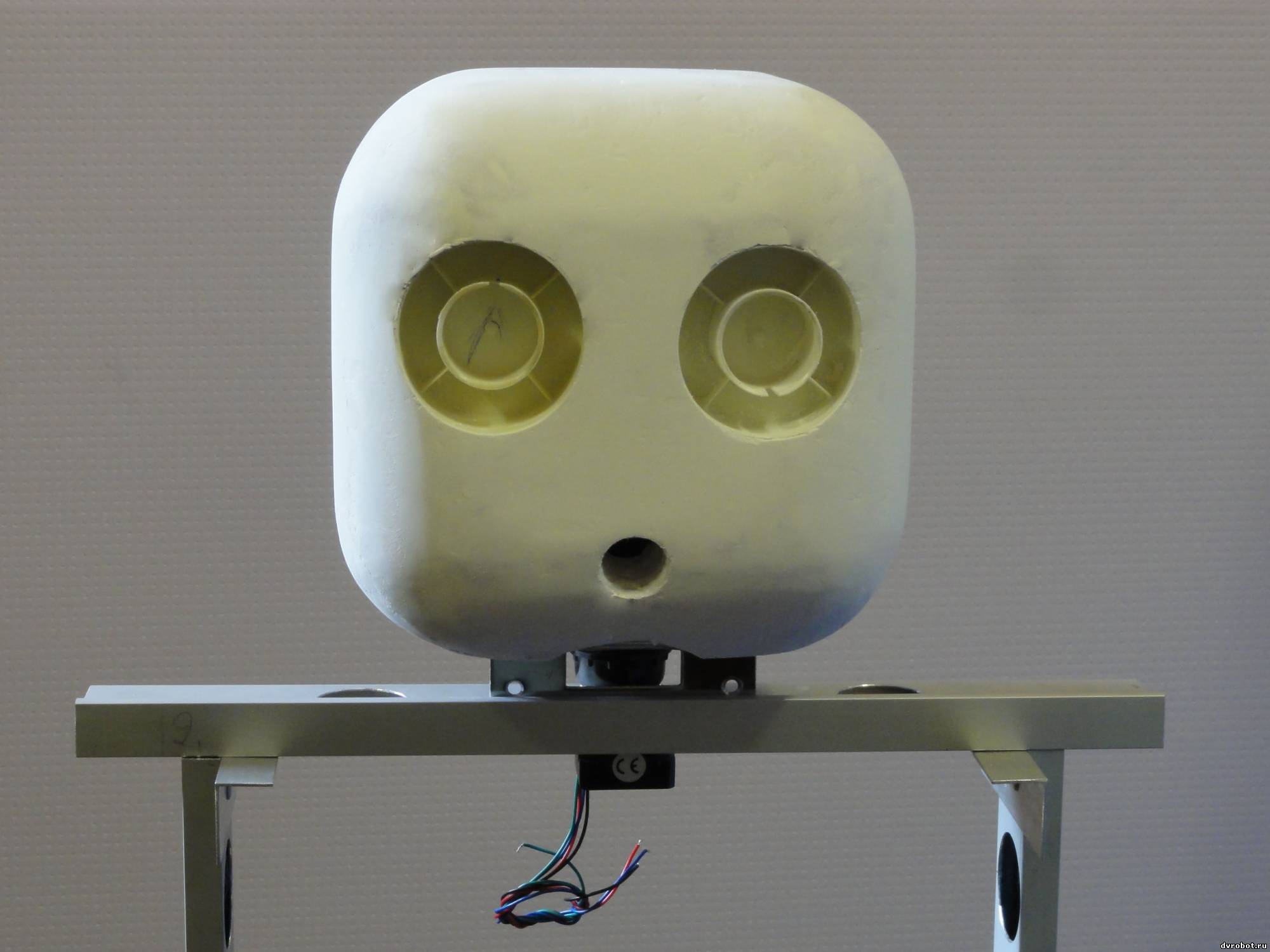
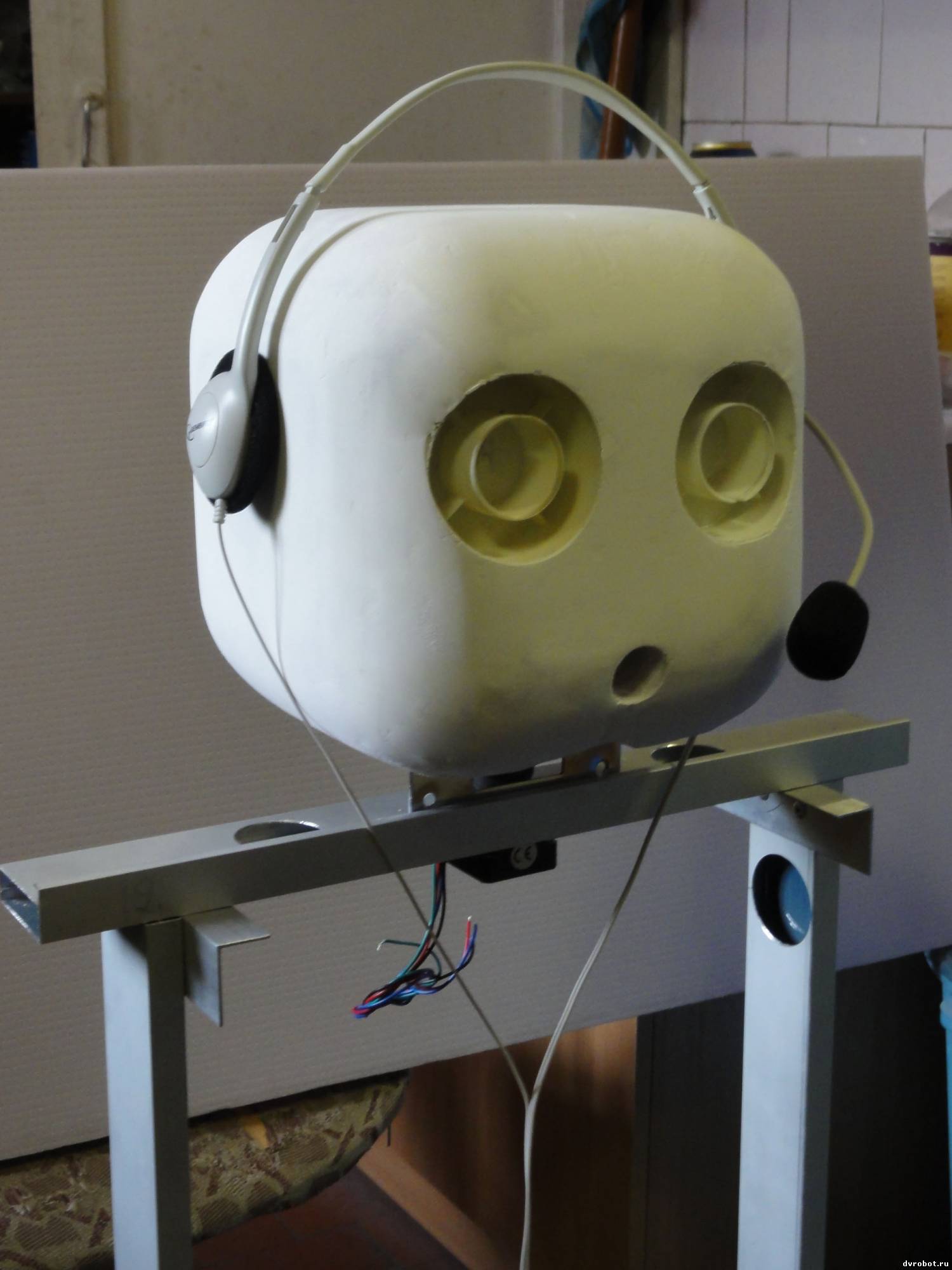
Прошу оценить изделие:
Это вид самой головки. В глазницах будут встроены зрачки с камерами

Так это будет выглядеть прилаженным к платформе
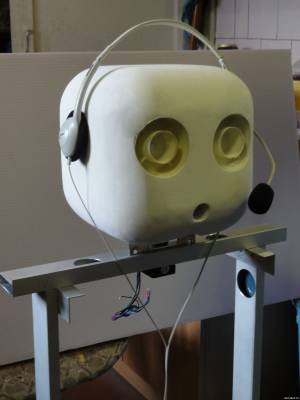
И еще две фотографии для полного антуража:


Сообщение отредактировал lori - Среда, 13.11.2013, 17:12 |
| |
| |
| DuZeR | Дата: Четверг, 06.06.2013, 13:12 | Сообщение # 16 |
 5 Вольт
Группа: Пользователи
Сообщений: 42
Репутация: 2
Статус: Offline
| Молодцы! Законченный концепт проекта существует ? Слежу за развитием проекта..
Возможности машины зависят от фантазии человека...
|
| |
| |
| lori | Дата: Четверг, 20.06.2013, 21:16 | Сообщение # 17 |
|
12 Вольт
Группа: Пользователи
Сообщений: 108
Репутация: 20
Статус: Offline
| Законченного варианта нет. Роботы в процессе создания. При появлении изменений стараемся сразу публиковать их на сайте.
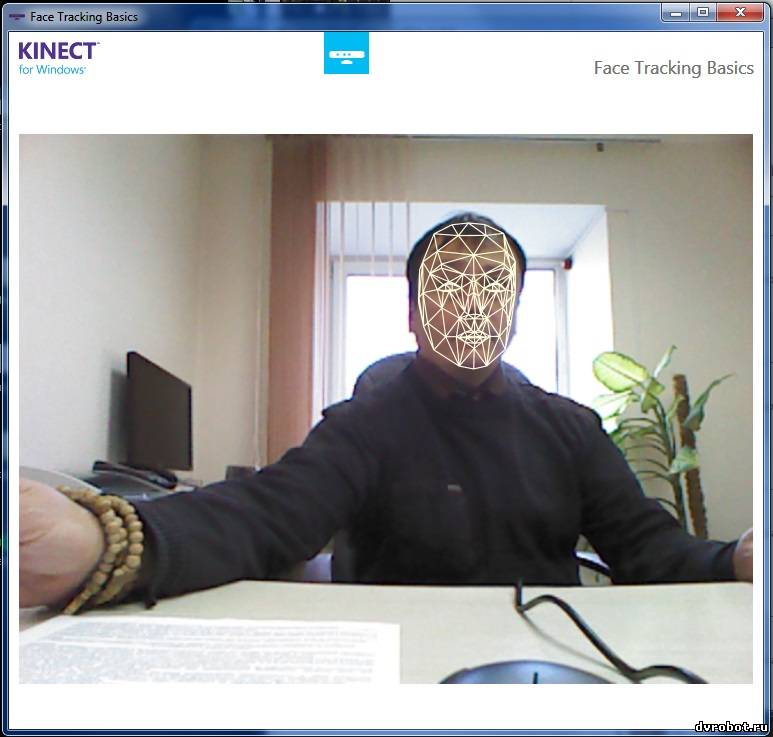
К стати, вчера разобрались как на openCV детектировать и отслеживать лицо человека. Теперь научим робота при обнаружении лица собеседника следить и поворачиваться за ним.
Ниже скриншот экрана компьютера с запущенной программой по определению лица. Сверху экрана захваченное видео с камеры, а снизу, то же видео с детектированным лицом (лицо и глаза обведены красными окружностями.

Добавлено (20.06.2013, 21:16)
---------------------------------------------
Сегодня нашел и подключил к C++ библиотеку для обмена данными между Arduino и РС через виртуальный COM порт. Теперь наш робот может "общаться" с компьютером по USB.
Следующий шаг уже сделан. На основании библиотеки opencv, которая детектирует лицо человека (смотрите предыдущий топик) наш робот поворачивает голову за человеком. Таким образом реализовано отслеживание лица человека стоящего перед роботом. Программа сделана так, что если в камеру попадает несколько лиц, т.е. перед роботом стоит несколько человек, выбирается человек стоящий ближе всего к роботу и голова робота поворачивается именно к нему (предполагается что стоящий ближе всех человек ведет диалог с роботом). Конечно, если перед роботом стоит один человек, то его лицо и будет отслеживаться.
Сообщение отредактировал lori - Среда, 13.11.2013, 07:56 |
| |
| |
| lori | Дата: Пятница, 23.08.2013, 23:29 | Сообщение # 18 |
|
12 Вольт
Группа: Пользователи
Сообщений: 108
Репутация: 20
Статус: Offline
| Всем привет!
В общем, такое дело - немного притормозили мы наш проект, но только притормозили, не забросили и не забыли, а связано это с огородно-дачными работами: посевная, поливная, окучивная, сборно-заготовительная и т.п. страда. Но даже в этот горячий период работы над проектом не стояли, медленно, но все таки продвигались. Чего мы достигли и что потеряли в последний период:
1. Самое грустное, что от нас оторвались два человека на которых мы возлагали большие надежды. Теперь операционно-системную часть проекта придется брать на себя, конечно это грустно, но как говориться "не бывает худа без добра", сами теперь изучим Linux и ROS. Возможно из за этого процесс замедлится, но даст нам возможность углубиться в эти среды.
2. Библиотека компьютерного зрения OpenCV стала как "родная", достаточно много разобрались с ней, хотя, конечно, не все еще изучили, но это вопрос времени.
3. Сделали прототип головы робота со встроенными камерами. В ближайшее время выложу фото.
4. В плотную подошли к необходимости приобретения и подключения Kinect.
5. Нарастили высоту оранжевой платформы (фото ниже)
Пока это все. Не густо конечно, но что-то двигается, на месте не стоим.
Сообщение отредактировал lori - Среда, 13.11.2013, 07:58 |
| |
| |
| lori | Дата: Пятница, 23.08.2013, 23:31 | Сообщение # 19 |
|
12 Вольт
Группа: Пользователи
Сообщений: 108
Репутация: 20
Статус: Offline
| Вид спереди

Вид сзади

|
| |
| |
| lori | Дата: Среда, 28.08.2013, 13:36 | Сообщение # 20 |
|
12 Вольт
Группа: Пользователи
Сообщений: 108
Репутация: 20
Статус: Offline
| Доброго времени суток!
Всех с праздником УСПЕНИЯ ПРЕСВЯТОЙ БОГОРОДИЦЫ!
Как и обещал публикую продолжение истории развития нашего робота.
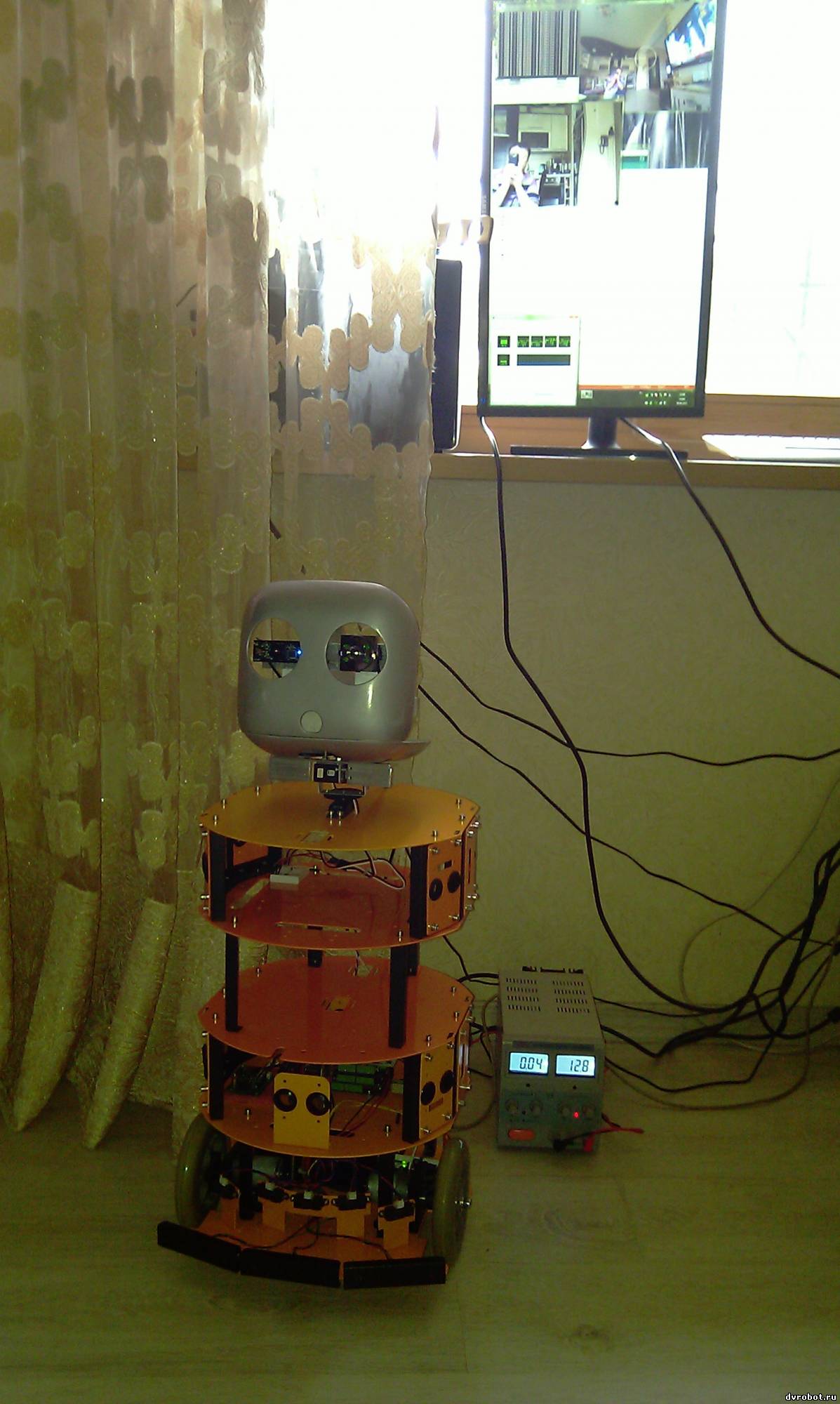
Третьего дня как приладили голову. Выкладываю фото:

Вот общий вид. В глазницах встроены видеокамеры. На заднем плане можно видеть монитор компьютера на котором отображаются картинки с камер. OpenCV в режиме реального времени отслеживает появления лица человека в поле зрения камер следит за движением человека и поворачивает голову робота вслед перемещения человека (жаль видео не вставить весьма эффектно выглядит). Одна из камер широкоформатная она отлавливает вообще любое движение в поле своего зрения и разворачивает платформу в сторону движения. Вторая камера "ловит" лицо человека и поворачивает голову робота на лицо. Правду сказать библиотека компьютерного зрения слегка подтормаживает, при отслеживании лица, это сказывается на плавности и скорости поворота головы робота, кроме того, если перемещаться быстро, то робот вообще не успевает поворачивать голову и теряет объект.

Вот вид в три четверти. Голова пока не доделана. Предполагается, что кроме камер будут встроены еще и микрофоны для отслеживания звуков и распознавания человеческой речи.

Это фото головки поближе.
Сейчас идет отладка программы отслеживания движения и лица человека.
Пока все.
Сообщение отредактировал lori - Среда, 13.11.2013, 08:03 |
| |
| |
| GRACH | Дата: Понедельник, 02.09.2013, 01:57 | Сообщение # 21 |
|
dvrobot.ru
Группа: Администраторы
Сообщений: 111
Репутация: 16181
Статус: Offline
| Очень интересно!!
Ждем с нетерпением продолжения!
|
| |
| |
| lori | Дата: Воскресенье, 22.09.2013, 22:03 | Сообщение # 22 |
|
12 Вольт
Группа: Пользователи
Сообщений: 108
Репутация: 20
Статус: Offline
| Продолжение.
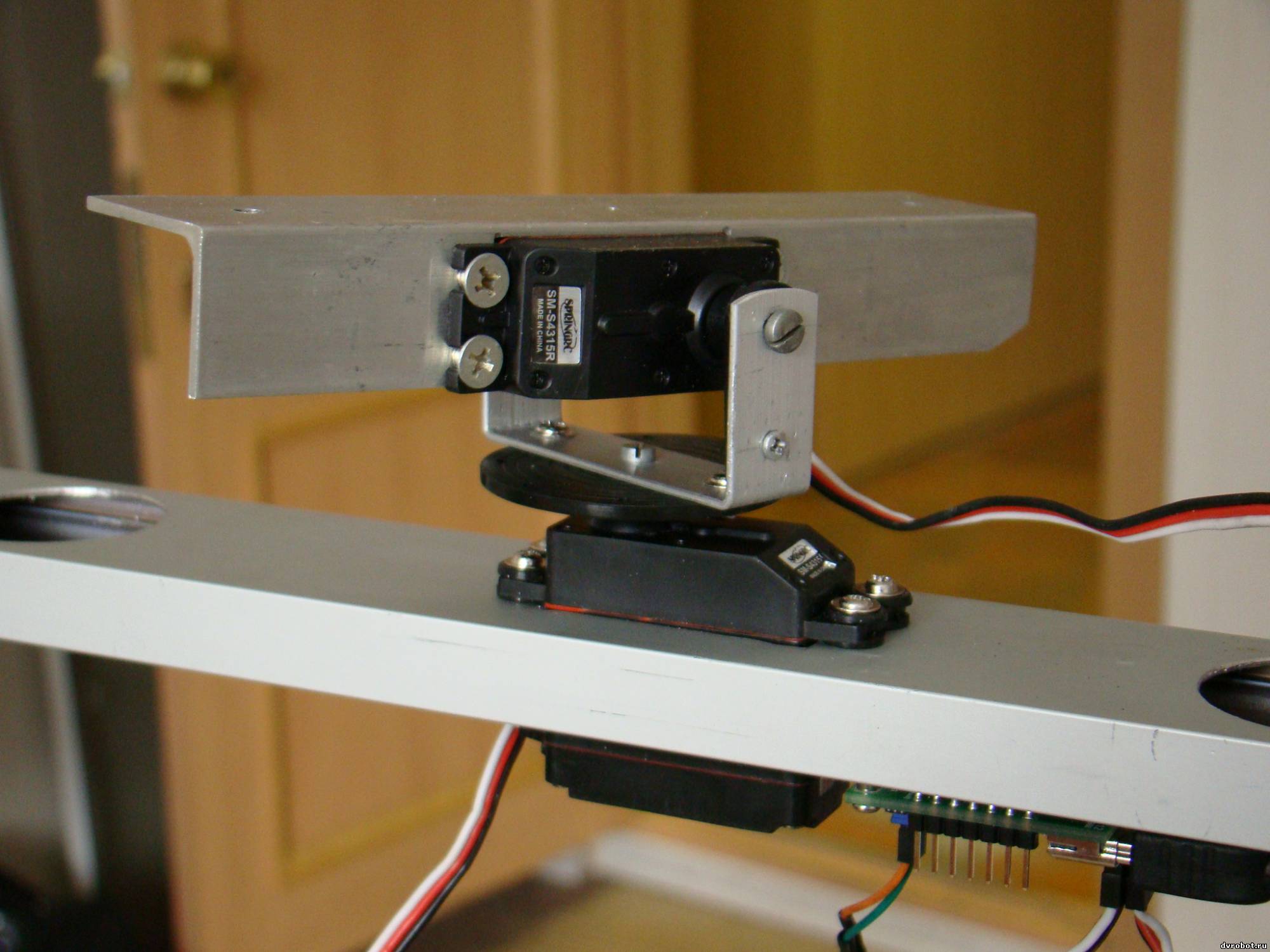
Испытания работы узла привода головы показали не удовлетворительную работу привода вращения головы в горизонтальной плоскости. Из за большой массы самой головы и не надежности существующего узла крепления головы к валу сервы, при повороте получается некоторое ускорение передаваемое серво-двигателю, который в свою очередь, из за обратной связи управления пытается повернуть свой вал обратном направлении, это действие передает голове новое ускорение, но уже в обратную сторону, серва снова пытается вернуть вал в нужное положение и таким образом возникает быстрые колебательные движения головы влево-вправо. Голова робота дергается как у "паралитика". Проблему могла решить установка поворотной серво-стойки (ID:512-33) имеющейся на сайте DVROBOT, но к огромному сожалению в наличии к продаже такой стойке не оказалось (очень жаль). Пришлось по аналогии с той, что на сайте изобретать свою конструкцию. Вот что получилось:

Теперь узел привода головы (шея) выглядит вот так:

Теперь узел поворота головы работает более стабильно и надежно.
Пока все.
Сообщение отредактировал lori - Понедельник, 25.11.2013, 18:03 |
| |
| |
| lori | Дата: Пятница, 04.10.2013, 11:27 | Сообщение # 23 |
|
12 Вольт
Группа: Пользователи
Сообщений: 108
Репутация: 20
Статус: Offline
| Вчера приобрели сенсор MS Kinect. Фото сенсора ниже:

Подключили к ПК и получили следующую картинку:

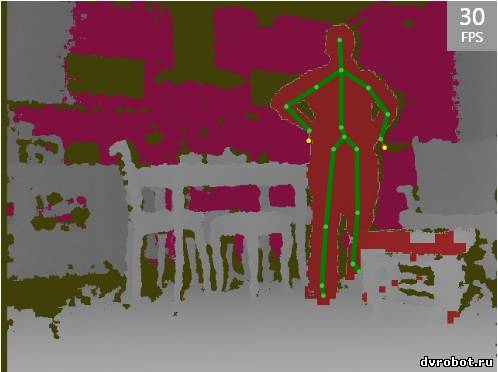
Это и есть карта глубины сцены, получить которую мы так долго мечтали. Чем ярче объект, тем он ближе находится к сенсору. Теперь нужно перехватить поток данных от Kinect-а и можно будет научить робота ориентироваться в пространстве. Использовать эти данные можно будет для реализации SLAM.
Метод одновременной навигации и построения карты (SLAM от англ. Simultaneous Location and Mapping) — метод, используемый роботами и автономными транспортными средствами для построения карты в неизвестном пространстве или для обновления карты в заранее известном пространстве с одновременным контролем текущего местоположения и пройденного пути.
Т.е. наш робот сможет свободно перемещаться в любом помещении не натыкаясь на предметы и обходя их. Кроме того Kinect умеет детектировать фигуру человека и отслеживать движения рук, ног, головы, туловища, а значит мы сможем научить робота отличать человека от любого другого предмета интерьера. И еще сенсор имеет встроенные микрофоны с помощью которых робот сможет поворачиваться на источник звука и распознавать речь.
В общем эта очень крутая штучка!!!
Начинаем с ней разбираться.
|
| |
| |
| GRACH | Дата: Пятница, 04.10.2013, 13:11 | Сообщение # 24 |
|
dvrobot.ru
Группа: Администраторы
Сообщений: 111
Репутация: 16181
Статус: Offline
| Здорово!!!
А где штучку эту покупали? можно ссылку, тоже хотим такую!!
|
| |
| |
| lori | Дата: Пятница, 04.10.2013, 13:54 | Сообщение # 25 |
|
12 Вольт
Группа: Пользователи
Сообщений: 108
Репутация: 20
Статус: Offline
| Вообще, это сенсор от игровой приставки XBOX 360, он идет в комплекте с приставкой, но сам сенсор можно купить и отдельно, главное чтобы это был сенсор под WINDOWS, это важно! т.к. такой сенсор оборудован USB переходником. Я натыкался на кинект для приставки XBOX, такой подключить к компьютеру не получится. А главное, что менеджеры в компьютерных магазинах тоже не разбираются в них. В общем так, если будете брать, просите чтобы открыли коробку, и смотрите на провода в комплекте - во первых должен быть блок питания, а во вторых на шнуре должен быть разъем USB для подключения к ПК.
Я покупал в компьютерном магазине DNS стоимость 6 890,00 руб. Через интернет можно и дешевле найти.
Сообщение отредактировал lori - Понедельник, 16.12.2013, 09:59 |
| |
| |
| GRACH | Дата: Пятница, 04.10.2013, 14:51 | Сообщение # 26 |
|
dvrobot.ru
Группа: Администраторы
Сообщений: 111
Репутация: 16181
Статус: Offline
| lori, Спасибо.
|
| |
| |
| lori | Дата: Пятница, 04.10.2013, 17:23 | Сообщение # 27 |
|
12 Вольт
Группа: Пользователи
Сообщений: 108
Репутация: 20
Статус: Offline
| Ниже представлен скрин захвата фигуры человека.

Если двигать руками и ногами, то наложенный на фигуру скелетон тоже движется в такт с человеком. На скрине видно наложение скелета на видео ряд, в окне справа вверху выделенная красным цветом фигура человека с наложенным скелетом. Так сенсор определяет облако точек которое принадлежит человеку. Распознается фигура мгновенно сразу после попадания в область сцены сенсора, движения повторяет без каких либо задержек и тормозов.
Здесь показано как сенсор отслеживает лицо человека, сенсор видит мимику, наклон и поворот головы.

Как видно, сенсор обладает поразительными возможностями.
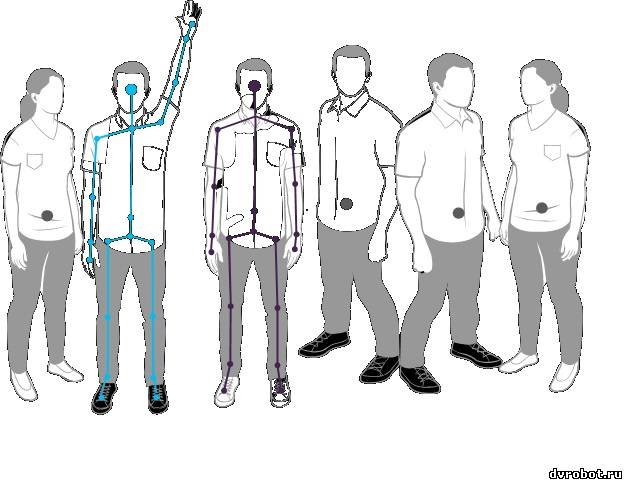
Но это еще не все. Этот сенсор версии 1.0, он может отслеживать и прорисовывать скелетоны двух человек, а еще четыре фигуры находящиеся в поле зрения сенсора просто будут обозначены как детектированные без наложения скелета. Схематически как это выглядит показано ниже:

На две фигуры наложен скелет, остальные обозначены точками в районе пупка.
Но недавно появилась новая версия сенсора Kinect 2.0, это сенсор к новой игровой консоли XBOX ONE от Microsoft, он кроме всего того что может сенсор версии 1.0, новый умеет обрабатывать до 6-ти человек одновременно, отслеживать пальцы, мышцы, мимику и даже сердцебиение человека, так что новый кинэкт не перепутает вас с манекеном или роботом андроидом. Правда, пока в России я в продаже этот сенсор не видел. Скажу по правде, мне несколько жутковато становится от всего этого, ведь если такие технологии настигли нас, простых смертных, то что же творится в военной робото-промышленности? Терминаторы не за горами!
Короче говоря, господа роботосторители, нужно дерзать, хорош собирать всякую фигню типа лего-ботов, или вибро-щеток, нужно двигаться и развиваться дальше, а иначе наши заморские братья скоро нам нос всем утрут.
Сообщение отредактировал lori - Понедельник, 25.11.2013, 18:08 |
| |
| |
| lori | Дата: Воскресенье, 06.10.2013, 20:43 | Сообщение # 28 |
|
12 Вольт
Группа: Пользователи
Сообщений: 108
Репутация: 20
Статус: Offline
| Еще интересно то, что сенсор видит в абсолютной темноте, но это и не удивительно, сенсор сканирует инфракрасным излучением.
Вот скрин, картинка сделана в полной темноте, как видно сенсор видит не только предметы интерьера, но и находит человека.

|
| |
| |
| GRACH | Дата: Воскресенье, 27.10.2013, 19:37 | Сообщение # 29 |
|
dvrobot.ru
Группа: Администраторы
Сообщений: 111
Репутация: 16181
Статус: Offline
| lori,
Как продвигаются дела?
Вы свой проект по прежнему строите на Ардуино Мега ? или уже перешли на другой микроконтроллер?Цитата lori (  ) Но есть проблемы - не знаем какую выбрать управляющую программу для работы с роботом на ПК, есть варианты ROS (под Linux) или Microsoft Robotics Developer Studio, но нет нужного опыта для работы с ними. Придется изучать с нуля. |
| |
| |
| lori | Дата: Понедельник, 28.10.2013, 14:57 | Сообщение # 30 |
|
12 Вольт
Группа: Пользователи
Сообщений: 108
Репутация: 20
Статус: Offline
| Все работает на меге, и переходить на другую платформу не планируется, разве что попробуем Arduino DUO. Дело в том, что для поставленных задач эта платформа вполне годится. Ардуина это самый нижний уровень робота, она отвечает за управление двигателями, а так же занимается сбором и первичной обработкой данных от датчиков, все остальные функции несет на себе компьютер. Он получает данные с ардуино, обрабатывает их, в соответствии с полученными и обработанными данными принимает решения и подает команды ардуинке на управление приводами.
Как то так, если в кратце.
Добавлено (28.10.2013, 07:17)
---------------------------------------------
Еще есть новость: после детального изучения сенсора Kinect - мы научились перехватывать потоки данных от сенсора, а также вскрыли и разобрали его. После чего пришли к выводу что голову робота придется кардинально переделать. Обе камеры которые стоят в глазах нужно убрать, а вместо них вставить Kinect, и еще придется переписать программное обеспечение робота, адаптировав его под сенсор. А так как сенсор оказался чуть шире чем существующая голова робота, то скорее всего придется переделать и саму голову, так чтобы в нее поместился сенсор. Короче говоря, перед нами стоит задача полностью переработать голову и скорее всего она будет совсем не такой как первый вариант.
Добавлено (28.10.2013, 14:54)
---------------------------------------------
К сожалению ROS так и не смогли запустить, дело в том, что он работает под Linux, человек более менее знающий эту операционку ушел из проекта, а я в ней полный дуб, можно конечно поковыряться, но опять же на это нужно время, так что ROS пока стои'т (очень жаль, не плохая весч). С MRDS все проще, она под винду написана да и разработчик сам микрософт. Возможно в итоге на ней остановимся. Но сейчас идут другие работы, до управляющей программы пока не дошли. Но возможно все будет на много банальнее - управление роботом напишем на C++, а потом готовые модули на C++ в MRDS вставим, там есть такая возможность. Но это все пока только мысли, более конкретно будем решать тогда, когда вплотную к этому подойдем.
Добавлено (28.10.2013, 14:57)
---------------------------------------------
Есть и хорошие новости. Мы вышли в нашем городе на техноцентр при политехническом университете. Там группа парней робототехникой занимается, думаем наладить контакты, общение и обмен опытом, тем более у них не плохая техническая база имеется: высокоточные токарные и фрезерные станки, измерительное оборудование, есть даже 3D принтер, надеемся мы будем друг другу полезны.
Сообщение отредактировал lori - Понедельник, 25.11.2013, 18:12 |
| |
| |